Road Class Reference
A class to represent a road in the simulation. More...
#include <Road.h>

Public Member Functions | |
| void | setLaneChangeReg (bool trackChanges, double outputTime, int roadLen, WORD registerType) |
| void | setDriveOnRight (bool OnRight) |
| Sets whether or not the vehicles should drive on the right. | |
| void | clear () |
| Clears the road so it can be used in another simulation. | |
| int | getPercentComplete () |
| bool | getAllowLaneChanging () |
| Gets whether or not lane changing is allowed. | |
| void | setAllowLaneChanging (bool status) |
| Sets whether or not lane changing is allowed. | |
| void | setLocOuputDetectorDirPos (int loc) |
| Sets the position of output detector in the positive direction. | |
| void | setLocOuputDetectorDirNeg (int loc) |
| Sets the position of output detector in the negative direction. | |
| void | setNoLanesDirPos (int nlpos) |
| Sets the number of lanes in the positive direction. | |
| void | setNoLanesDirNeg (int nlneg) |
| Sets the number of lanes in the negative direction. | |
| void | setNoDirections (int nd) |
| Sets the number of directions. | |
| void | setNoLanes (int nl) |
| Sets the number of lanes. | |
| void | setRoadLength (int L) |
| Sets the length of the road. | |
| void | setTrafFileNoLanesDirPos (int nl) |
| Sets the number of lanes in the positive direction in the traffic file. | |
| void | setTrafFileNoLanesDirNeg (int nl) |
| Sets the number of lanes in the negative direction in the traffic file. | |
| void | setIDMParams_Car (CIDMParameterSet *Params) |
| Sets the Car IDM Parameter Set. | |
| void | setIDMParams_SmallTruck (CIDMParameterSet *Params) |
| Sets the Small Truck IDM Parameter Set. | |
| void | setIDMParams_LargeTruck (CIDMParameterSet *Params) |
| Sets the Large Truck IDM Parameter Set. | |
| void | setIDMParams_Crane (CIDMParameterSet *Params) |
| Sets the Crane IDM Parameter Set. | |
| void | setIDMParams_Lowloader (CIDMParameterSet *Params) |
| Sets the Lowloader IDM Parameter Set. | |
| void | SetSegmentFromFeature (CRoadFeature *pFeat) |
| Sets road segments based on data specified by the user to the GUI. | |
| void | SetMetricDetFromStatDet (CStatDetector *pDet, int nLanesPos, int nLanesNeg) |
| Sets the road metrics detector data from input through the GUI. | |
| double | getLength () |
| Gets the length of the road. | |
| M2D | getVehicles () |
| Gets all the vehicles on the road. | |
| void | initTruckGroup (string inFile, string outFile, WORD fileType) |
| Initialises the file handler. | |
| bool | update (double step, const double curTime) |
| Updates the properties of the road. | |
| void | populate (double step, const double curTime) |
| Populates the road. | |
| double | init () |
| Initialises the road. | |
| Road () | |
| Constructor. | |
| virtual | ~Road () |
| Destructor. | |
Private Member Functions | |
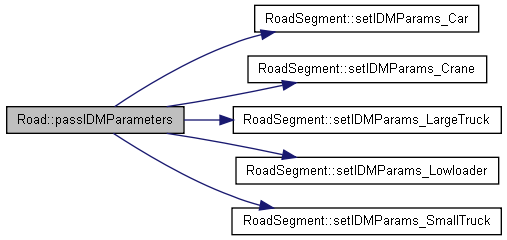
| void | passIDMParameters (RoadSegment *segment) |
| Passes the IDM parameters to a given road segment. | |
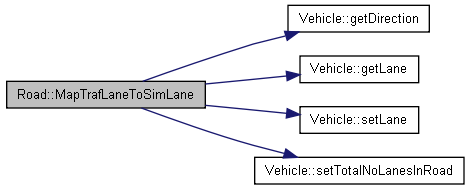
| void | MapTrafLaneToSimLane (Vehicle *pVeh) |
| Maps vehicles to appropriate lanes. | |
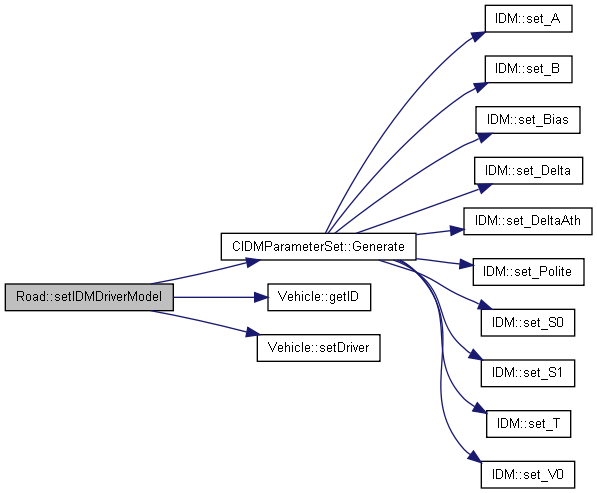
| void | setIDMDriverModel (Vehicle *pVeh) |
| Sets a vehicle's drivermodel as IDM. | |
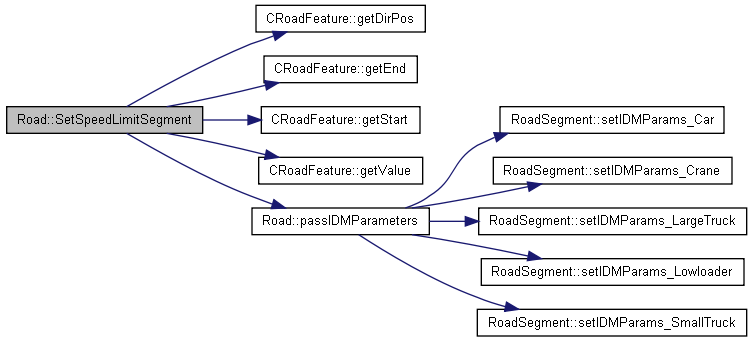
| void | SetSpeedLimitSegment (CRoadFeature *pFeat) |
| Sets a speed limit based on data specified by the user to the GUI. | |
| void | SetGradientSegment (CRoadFeature *pFeat) |
| Sets a gradient based on data specified by the user to the GUI. | |
Private Attributes | |
| bool | m_DriveOnRight |
| int | m_PercentComplete |
| CIDMParameterSet * | m_pIDMParams_Car |
| CIDMParameterSet * | m_pIDMParams_SmallTruck |
| CIDMParameterSet * | m_pIDMParams_LargeTruck |
| CIDMParameterSet * | m_pIDMParams_Crane |
| CIDMParameterSet * | m_pIDMParams_Lowloader |
| int | m_LocOutputDetectorDirPos |
| int | m_LocOutputDetectorDirNeg |
| Direction | DirectionPos |
| Direction | DirectionNeg |
| int | m_TrafFileNoLanesDirPos |
| int | m_TrafFileNoLanesDirNeg |
| FileHandler * | m_pFileHandler |
| std::vector< Vehicle * > | m_BufferVehicles |
| std::vector< Lane * > | m_vLanes |
| std::vector< Detector * > | m_vDetectorsPos |
| std::vector< Detector * > | m_vDetectorsNeg |
| std::vector< int > | m_vLaneLengthsPos |
| std::vector< int > | m_vLaneLengthsNeg |
| std::vector< RoadSegment * > | m_vRoadSegmentsPos |
| std::vector< RoadSegment * > | m_vRoadSegmentsNeg |
| bool | m_bEndOfFile |
| bool | m_AllowLaneChanging |
| int | m_NoLanesDirPos |
| int | m_NoLanesDirNeg |
| int | m_NoDirections |
| int | m_NoLanes |
| int | m_RoadLength |
| double | MIN_SPACE_FOR_NEXT_VEHICLE |
Detailed Description
A class to represent a road in the simulation.Definition at line 21 of file Road.h.
Constructor & Destructor Documentation
| Road::Road | ( | ) |
Constructor.
Definition at line 9 of file Road.cpp.
References CConfigData::IDM, m_bEndOfFile, m_pFileHandler, m_pIDMParams_Car, m_pIDMParams_Crane, m_pIDMParams_LargeTruck, m_pIDMParams_Lowloader, m_pIDMParams_SmallTruck, CConfigData::IDM_Config::MIN_SPACE_FOR_NEXT_VEHICLE, and MIN_SPACE_FOR_NEXT_VEHICLE.
00010 { 00011 MIN_SPACE_FOR_NEXT_VEHICLE = g_ConfigData.IDM.MIN_SPACE_FOR_NEXT_VEHICLE; 00012 00013 m_pIDMParams_Car = NULL; 00014 m_pIDMParams_SmallTruck = NULL; 00015 m_pIDMParams_LargeTruck = NULL; 00016 m_pIDMParams_Crane = NULL; 00017 m_pIDMParams_Lowloader = NULL; 00018 00019 m_pFileHandler = NULL; 00020 00021 m_bEndOfFile = false; 00022 }
| Road::~Road | ( | ) | [virtual] |
Destructor.
Definition at line 25 of file Road.cpp.
References m_pIDMParams_Car, m_pIDMParams_Crane, m_pIDMParams_LargeTruck, m_pIDMParams_Lowloader, and m_pIDMParams_SmallTruck.
00026 { 00027 m_pIDMParams_Car = NULL; 00028 m_pIDMParams_SmallTruck = NULL; 00029 m_pIDMParams_LargeTruck = NULL; 00030 m_pIDMParams_Crane = NULL; 00031 m_pIDMParams_Lowloader = NULL; 00032 }
Member Function Documentation
| void Road::setLaneChangeReg | ( | bool | trackChanges, | |
| double | outputTime, | |||
| int | roadLen, | |||
| WORD | registerType | |||
| ) |
| void Road::setDriveOnRight | ( | bool | OnRight | ) |
Sets whether or not the vehicles should drive on the right.
- Parameters:
-
OnRight Whether or not the vehicles should drive on the right
Definition at line 445 of file Road.cpp.
References m_DriveOnRight.
Referenced by CEvolveTrafficDoc::initSim().
00446 { 00447 m_DriveOnRight = OnRight; 00448 }
| void Road::clear | ( | ) |
Clears the road so it can be used in another simulation.
This function clears all of the road's information so that it may be used in another simulation without re-instanciating.
Definition at line 608 of file Road.cpp.
References Direction::clear(), DirectionNeg, DirectionPos, m_BufferVehicles, m_NoDirections, m_pFileHandler, m_pIDMParams_Car, m_pIDMParams_Crane, m_pIDMParams_LargeTruck, m_pIDMParams_Lowloader, m_pIDMParams_SmallTruck, m_vDetectorsNeg, m_vDetectorsPos, m_vLanes, m_vRoadSegmentsNeg, and m_vRoadSegmentsPos.
Referenced by Sim::clear().
00609 { 00610 DirectionPos.clear(); 00611 if(m_NoDirections == 2) 00612 DirectionNeg.clear(); 00613 00614 delete m_pFileHandler; 00615 00616 m_vLanes.clear(); 00617 00618 m_BufferVehicles.clear(); 00619 00620 m_vDetectorsPos.clear(); 00621 m_vDetectorsNeg.clear(); 00622 00623 m_vRoadSegmentsPos.clear(); 00624 m_vRoadSegmentsNeg.clear(); 00625 00626 // why don't we just delete these? 00627 m_pIDMParams_Car = NULL; 00628 m_pIDMParams_SmallTruck = NULL; 00629 m_pIDMParams_LargeTruck = NULL; 00630 m_pIDMParams_Crane = NULL; 00631 m_pIDMParams_Lowloader = NULL; 00632 }

| int Road::getPercentComplete | ( | ) |
Definition at line 418 of file Road.cpp.
References m_PercentComplete.
Referenced by Sim::doOneTimeStep().
00419 { 00420 return m_PercentComplete; 00421 }
| bool Road::getAllowLaneChanging | ( | ) |
Gets whether or not lane changing is allowed.
- Returns:
- Whether or not lane changing is allowed
Definition at line 427 of file Road.cpp.
References m_AllowLaneChanging.
00428 { 00429 return m_AllowLaneChanging; 00430 }
| void Road::setAllowLaneChanging | ( | bool | status | ) |
Sets whether or not lane changing is allowed.
- Parameters:
-
status Whether or not lane changing is allowed
Definition at line 436 of file Road.cpp.
References m_AllowLaneChanging.
Referenced by CEvolveTrafficDoc::initSim().
00437 { 00438 m_AllowLaneChanging = status; 00439 }
| void Road::setLocOuputDetectorDirPos | ( | int | loc | ) |
Sets the position of output detector in the positive direction.
- Parameters:
-
loc The position of output detector
Definition at line 402 of file Road.cpp.
References m_LocOutputDetectorDirPos.
Referenced by CEvolveTrafficDoc::initSim().
00403 { 00404 m_LocOutputDetectorDirPos = loc; 00405 }
| void Road::setLocOuputDetectorDirNeg | ( | int | loc | ) |
Sets the position of output detector in the negative direction.
- Parameters:
-
loc The position of output detector
Definition at line 412 of file Road.cpp.
References m_LocOutputDetectorDirNeg, and m_RoadLength.
Referenced by CEvolveTrafficDoc::initSim().
00413 { 00414 // change from overall road coordinates to lane coordinates 00415 m_LocOutputDetectorDirNeg = m_RoadLength - loc; 00416 }
| void Road::setNoLanesDirPos | ( | int | nlpos | ) |
Sets the number of lanes in the positive direction.
- Parameters:
-
nlpos The number of lanes in the positive direction
Definition at line 271 of file Road.cpp.
References m_NoLanesDirPos.
Referenced by Sim::init().
00272 { 00273 m_NoLanesDirPos = nlpos; 00274 }
| void Road::setNoLanesDirNeg | ( | int | nlneg | ) |
Sets the number of lanes in the negative direction.
- Parameters:
-
nlneg The number of lanes in the negative direction
Definition at line 280 of file Road.cpp.
References m_NoLanesDirNeg.
Referenced by Sim::init().
00281 { 00282 m_NoLanesDirNeg = nlneg; 00283 }
| void Road::setNoDirections | ( | int | nd | ) |
Sets the number of directions.
- Parameters:
-
nd The number of directions
Definition at line 289 of file Road.cpp.
References m_NoDirections.
Referenced by Sim::init().
00290 { 00291 m_NoDirections = nd; 00292 }
| void Road::setNoLanes | ( | int | nl | ) |
Sets the number of lanes.
- Parameters:
-
nl The number of lanes
Definition at line 298 of file Road.cpp.
References m_NoLanes.
Referenced by Sim::init().
00299 { 00300 m_NoLanes = nl; 00301 }
| void Road::setRoadLength | ( | int | L | ) |
Sets the length of the road.
- Parameters:
-
L The length of the road
Definition at line 307 of file Road.cpp.
References m_RoadLength.
Referenced by Sim::init(), and Sim::setRoadLength().
00308 { 00309 m_RoadLength = L; 00310 }
| void Road::setTrafFileNoLanesDirPos | ( | int | nl | ) |
Sets the number of lanes in the positive direction in the traffic file.
- Parameters:
-
nl The number of lanes
Definition at line 384 of file Road.cpp.
References m_TrafFileNoLanesDirPos.
Referenced by CEvolveTrafficDoc::initSim().
00385 { 00386 m_TrafFileNoLanesDirPos = nl; 00387 }
| void Road::setTrafFileNoLanesDirNeg | ( | int | nl | ) |
Sets the number of lanes in the negative direction in the traffic file.
- Parameters:
-
nl The number of lanes
Definition at line 393 of file Road.cpp.
References m_TrafFileNoLanesDirNeg.
Referenced by CEvolveTrafficDoc::initSim().
00394 { 00395 m_TrafFileNoLanesDirNeg = nl; 00396 }
| void Road::setIDMParams_Car | ( | CIDMParameterSet * | Params | ) |
Sets the Car IDM Parameter Set.
- Parameters:
-
Params The IDM Parameter Set
Definition at line 339 of file Road.cpp.
References m_pIDMParams_Car.
Referenced by CEvolveTrafficDoc::initSim().
00340 { 00341 m_pIDMParams_Car = Params; 00342 }
| void Road::setIDMParams_SmallTruck | ( | CIDMParameterSet * | Params | ) |
Sets the Small Truck IDM Parameter Set.
- Parameters:
-
Params The IDM Parameter Set
Definition at line 348 of file Road.cpp.
References m_pIDMParams_SmallTruck.
Referenced by CEvolveTrafficDoc::initSim().
00349 { 00350 m_pIDMParams_SmallTruck = Params; 00351 }
| void Road::setIDMParams_LargeTruck | ( | CIDMParameterSet * | Params | ) |
Sets the Large Truck IDM Parameter Set.
- Parameters:
-
Params The IDM Parameter Set
Definition at line 357 of file Road.cpp.
References m_pIDMParams_LargeTruck.
Referenced by CEvolveTrafficDoc::initSim().
00358 { 00359 m_pIDMParams_LargeTruck = Params; 00360 }
| void Road::setIDMParams_Crane | ( | CIDMParameterSet * | Params | ) |
Sets the Crane IDM Parameter Set.
- Parameters:
-
Params The IDM Parameter Set
Definition at line 366 of file Road.cpp.
References m_pIDMParams_Crane.
Referenced by CEvolveTrafficDoc::initSim().
00367 { 00368 m_pIDMParams_Crane = Params; 00369 }
| void Road::setIDMParams_Lowloader | ( | CIDMParameterSet * | Params | ) |
Sets the Lowloader IDM Parameter Set.
- Parameters:
-
Params The IDM Parameter Set
Definition at line 375 of file Road.cpp.
References m_pIDMParams_Lowloader.
Referenced by CEvolveTrafficDoc::initSim().
00376 { 00377 m_pIDMParams_Lowloader = Params; 00378 }
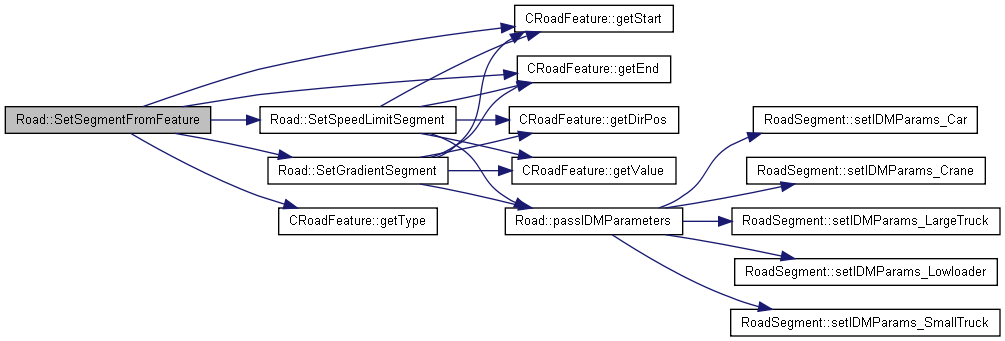
| void Road::SetSegmentFromFeature | ( | CRoadFeature * | pFeat | ) |
Sets road segments based on data specified by the user to the GUI.
- Parameters:
-
pFeat The road feature to create
Definition at line 470 of file Road.cpp.
References FEAT_GRADIENT, FEAT_SPEEDLIMIT, CRoadFeature::getEnd(), CRoadFeature::getStart(), CRoadFeature::getType(), SetGradientSegment(), and SetSpeedLimitSegment().
Referenced by CEvolveTrafficDoc::initSim().
00471 { 00472 ASSERT(pFeat->getStart() < pFeat->getEnd()); // should be since done in CRoadFeaturesDlg validation 00473 00474 switch( pFeat->getType() ) 00475 { 00476 case FEAT_SPEEDLIMIT: 00477 SetSpeedLimitSegment(pFeat); 00478 break; 00479 case FEAT_GRADIENT: 00480 SetGradientSegment(pFeat); 00481 break; 00482 default: 00483 break; 00484 } 00485 00486 }
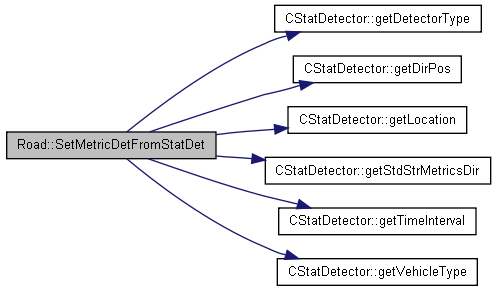
| void Road::SetMetricDetFromStatDet | ( | CStatDetector * | pDet, | |
| int | nLanesPos, | |||
| int | nLanesNeg | |||
| ) |
Sets the road metrics detector data from input through the GUI.
- Parameters:
-
pDet The detector to create nLanesPos The number of lanes in the positive direction nLanesNeg The number of lanes in the negative direction
Definition at line 555 of file Road.cpp.
References CStatDetector::getDetectorType(), CStatDetector::getDirPos(), CStatDetector::getLocation(), CStatDetector::getStdStrMetricsDir(), CStatDetector::getTimeInterval(), CStatDetector::getVehicleType(), m_RoadLength, m_vDetectorsNeg, m_vDetectorsPos, and METRICS_TYPE_LANE_CHANGE.
Referenced by CEvolveTrafficDoc::initSim().
00556 { 00557 bool bDirPos = pDet->getDirPos(); 00558 00559 if(pDet->getDetectorType() == METRICS_TYPE_LANE_CHANGE) 00560 { 00561 LaneChangeDetector* pLCD; 00562 pLCD = new LaneChangeDetector( pDet->getStdStrMetricsDir(), 00563 pDet->getTimeInterval(), 00564 pDet->getLocation(), 00565 m_RoadLength, 00566 bDirPos, 00567 pDet->getVehicleType()); 00568 if( bDirPos ) 00569 m_vDetectorsPos.push_back(pLCD); 00570 else 00571 m_vDetectorsNeg.push_back(pLCD); 00572 } 00573 else 00574 { 00575 MetricsDetector* pMD; 00576 if( bDirPos ) 00577 { 00578 pMD = new MetricsDetector( pDet->getStdStrMetricsDir(), 00579 pDet->getDetectorType(), 00580 bDirPos, 00581 nLanesPos, 00582 pDet->getVehicleType(), 00583 pDet->getTimeInterval(), 00584 pDet->getLocation(), 00585 m_RoadLength); 00586 m_vDetectorsPos.push_back(pMD); 00587 } 00588 else 00589 { 00590 pMD = new MetricsDetector( pDet->getStdStrMetricsDir(), 00591 pDet->getDetectorType(), 00592 bDirPos, 00593 nLanesNeg, 00594 pDet->getVehicleType(), 00595 pDet->getTimeInterval(), 00596 m_RoadLength - pDet->getLocation(), // change from global road to local dirn coords 00597 m_RoadLength); // need this to revert filenames to global positions 00598 m_vDetectorsNeg.push_back(pMD); 00599 } 00600 } 00601 }
| double Road::getLength | ( | ) |
Gets the length of the road.
- Returns:
- The length of the road
Definition at line 262 of file Road.cpp.
References m_RoadLength.
Referenced by Sim::getRoadLength().
00263 { 00264 return m_RoadLength; 00265 }
| M2D Road::getVehicles | ( | ) |
Gets all the vehicles on the road.
- Returns:
- All the vehicles on the road
Definition at line 238 of file Road.cpp.
References DirectionNeg, DirectionPos, Direction::getGlobalPos(), m_NoDirections, m_NoLanesDirNeg, and m_NoLanesDirPos.
Referenced by Sim::doOneTimeStep().
00239 { 00240 M2D pos; 00241 00242 M2D temp = DirectionPos.getGlobalPos(); // get DirPos positions 00243 for(int i = 0; i < m_NoLanesDirPos; i++) // and add lane by lane 00244 pos.push_back(temp[i]); 00245 00246 if(m_NoDirections == 2) // Uni-directional roads are in Dir1 00247 { 00248 temp.clear(); 00249 00250 temp = DirectionNeg.getGlobalPos(); // get DirNeg positions 00251 for(i = 0; i < m_NoLanesDirNeg; i++) // and add lane by lane 00252 pos.push_back(temp[i]); 00253 } 00254 00255 return pos; 00256 }

| void Road::initTruckGroup | ( | string | inFile, | |
| string | outFile, | |||
| WORD | fileType | |||
| ) |
Initialises the file handler.
- Parameters:
-
inFile The input file to read from outFile The output file to write to fileType The type of file
Definition at line 322 of file Road.cpp.
References CASTOR, m_pFileHandler, and SAFT.
Referenced by Sim::init().
00323 { 00324 if(fileType == CASTOR) 00325 { 00326 m_pFileHandler = new CASTORFile(inFile, outFile); 00327 00328 } 00329 else if(fileType == SAFT) 00330 { 00331 m_pFileHandler = new SAFTFile(inFile, outFile); 00332 } 00333 }
| bool Road::update | ( | double | step, | |
| const double | curTime | |||
| ) |
Updates the properties of the road.
- Parameters:
-
step The timestep curTime The current time
- Returns:
- Whether or not the simulation is still running
Definition at line 43 of file Road.cpp.
References DirectionNeg, DirectionPos, m_bEndOfFile, m_NoDirections, m_vDetectorsNeg, m_vDetectorsPos, and Direction::update().
Referenced by Sim::doOneTimeStep().
00044 { 00045 bool SimulationOver = false; 00046 bool RoadEmpty = false; 00047 bool DirPosEmpty = false; 00048 bool DirNegEmpty = false; 00049 00050 // since there's always one direction 00051 DirPosEmpty = DirectionPos.update(step, curTime); 00052 00053 if(m_NoDirections == 2) 00054 DirNegEmpty = DirectionNeg.update(step, curTime); 00055 00056 if(DirPosEmpty && DirNegEmpty) 00057 RoadEmpty = true; 00058 00059 if(RoadEmpty && m_bEndOfFile) // if no more vehicles and road is empty 00060 SimulationOver = true; // we are finished! 00061 00062 if(SimulationOver) // tidy up detector output 00063 { 00064 for(int i = 0; i < m_vDetectorsPos.size(); i++) 00065 m_vDetectorsPos[i]->EndOutput(); 00066 for(i = 0; i < m_vDetectorsNeg.size(); i++) 00067 m_vDetectorsNeg[i]->EndOutput(); 00068 } 00069 00070 return SimulationOver; 00071 }

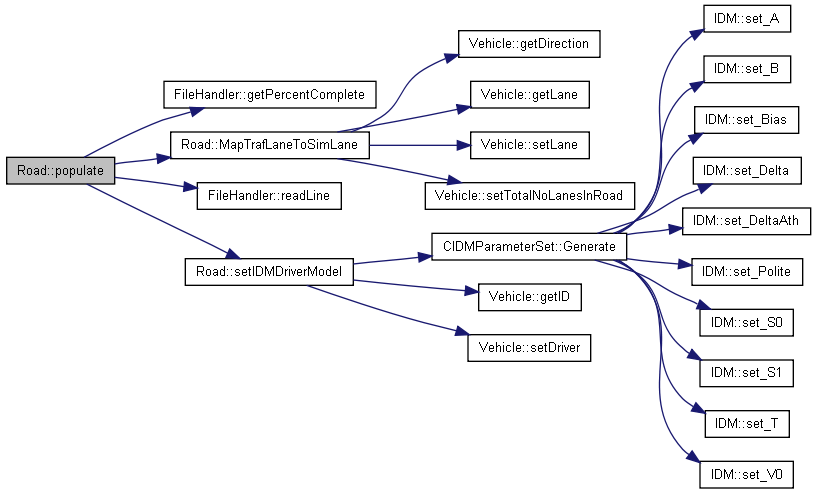
| void Road::populate | ( | double | step, | |
| const double | curTime | |||
| ) |
Populates the road.
- Parameters:
-
step The timestep curTime The simulation's current time
Definition at line 141 of file Road.cpp.
References FileHandler::getPercentComplete(), m_bEndOfFile, m_BufferVehicles, m_DriveOnRight, m_PercentComplete, m_pFileHandler, m_RoadLength, m_vLanes, MapTrafLaneToSimLane(), MIN_SPACE_FOR_NEXT_VEHICLE, FileHandler::readLine(), and setIDMDriverModel().
Referenced by Sim::doOneTimeStep().
00142 { 00143 bool frontOn = true; 00144 while(m_BufferVehicles.size() > 0 && frontOn) 00145 { 00146 frontOn = false; 00147 int lane = m_BufferVehicles.front()->getLane() - 1; // the cumulative lane no of the next truck on the road 00148 00149 if(m_vLanes.at(lane)->getLastPos() >= MIN_SPACE_FOR_NEXT_VEHICLE) // If there is space for another vehicle 00150 { 00151 if(m_BufferVehicles.front()->getTime() <= curTime) // If it is time for the next vehicle 00152 { 00153 int noVeh = m_vLanes.at(lane)->getNoVeh(); // crashes here sim has fewer lanes than the truck file. 00154 00155 // set the driver, roadlength, insert into lane and remove from buffer 00156 setIDMDriverModel(m_BufferVehicles.front()); 00157 m_BufferVehicles.front()->init(m_RoadLength, m_DriveOnRight); 00158 m_vLanes.at(lane)->insert(noVeh, m_BufferVehicles.front()); 00159 m_BufferVehicles.erase(m_BufferVehicles.begin()); 00160 00161 Vehicle* tempVeh = m_pFileHandler->readLine(); 00162 m_PercentComplete = m_pFileHandler->getPercentComplete(); 00163 if(tempVeh != NULL) 00164 { 00165 MapTrafLaneToSimLane(tempVeh); 00166 m_BufferVehicles.push_back(tempVeh); 00167 } 00168 else 00169 m_bEndOfFile = true; 00170 frontOn = true; 00171 } 00172 } 00173 00174 } 00175 }
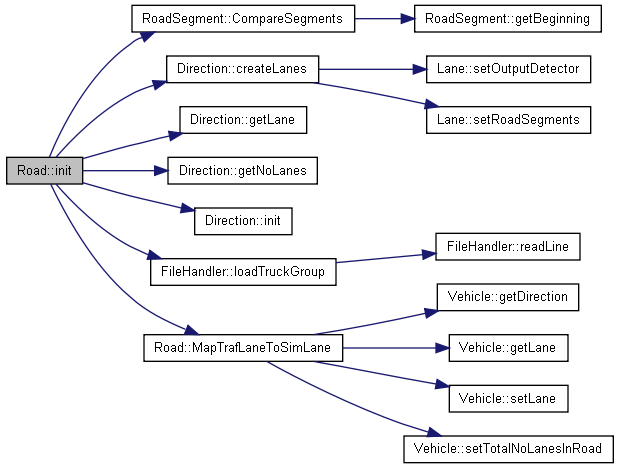
| double Road::init | ( | ) |
Initialises the road.
- Returns:
- The time to the first vehicle
Definition at line 85 of file Road.cpp.
References RoadSegment::CompareSegments(), Direction::createLanes(), DirectionNeg, DirectionPos, Direction::getLane(), Direction::getNoLanes(), Direction::init(), INPUT_FILE_BUFFER_SIZE, FileHandler::loadTruckGroup(), m_AllowLaneChanging, m_BufferVehicles, m_DriveOnRight, m_LocOutputDetectorDirNeg, m_LocOutputDetectorDirPos, m_NoDirections, m_NoLanesDirNeg, m_NoLanesDirPos, m_pFileHandler, m_RoadLength, m_vDetectorsNeg, m_vDetectorsPos, m_vLanes, m_vRoadSegmentsNeg, m_vRoadSegmentsPos, and MapTrafLaneToSimLane().
Referenced by Sim::init().
00086 { 00087 sort(m_vRoadSegmentsPos.begin(), m_vRoadSegmentsPos.end(), RoadSegment::CompareSegments); 00088 sort(m_vRoadSegmentsNeg.begin(), m_vRoadSegmentsNeg.end(), RoadSegment::CompareSegments); 00089 00090 // Initially set up vehicles and their sim lanes 00091 m_BufferVehicles = m_pFileHandler->loadTruckGroup(INPUT_FILE_BUFFER_SIZE); 00092 for(int i = 0; i < m_BufferVehicles.size(); i++) 00093 MapTrafLaneToSimLane(m_BufferVehicles.at(i)); 00094 00096 // lane vector 00097 std::vector<int> vLaneLengthsPos(m_NoLanesDirPos,m_RoadLength); // this is for future extension 00098 00099 // true means positive x-direction 00100 OutputDetector* pDetDirPos = new OutputDetector(m_LocOutputDetectorDirPos, true, m_pFileHandler); 00101 DirectionPos.init(true, pDetDirPos, m_AllowLaneChanging, m_RoadLength, m_DriveOnRight); 00102 DirectionPos.createLanes(0, vLaneLengthsPos, m_vDetectorsPos, m_vRoadSegmentsPos); 00103 00104 // Using cumulative lane identifiers 00105 for(i = 0; i < DirectionPos.getNoLanes(); i++) 00106 m_vLanes.push_back(&DirectionPos.getLane(i)); 00107 00109 if(m_NoDirections == 2) 00110 { 00111 // lane vector 00112 std::vector<int> vLaneLengthsNeg(m_NoLanesDirNeg,m_RoadLength); 00113 00114 // false means the negative x-direction 00115 OutputDetector* pDetDirNeg = new OutputDetector(m_LocOutputDetectorDirNeg, false, m_pFileHandler); 00116 DirectionNeg.init(false, pDetDirNeg, m_AllowLaneChanging, m_RoadLength, m_DriveOnRight); 00117 DirectionNeg.createLanes(m_NoLanesDirPos, vLaneLengthsNeg, m_vDetectorsNeg, m_vRoadSegmentsNeg); 00118 00119 for(i = 0; i < DirectionNeg.getNoLanes(); i++) 00120 m_vLanes.push_back(&DirectionNeg.getLane(i)); 00121 } 00122 00123 // Return the time of the first truck of the traffic file 00124 return m_BufferVehicles.front()->getTime(); 00125 }
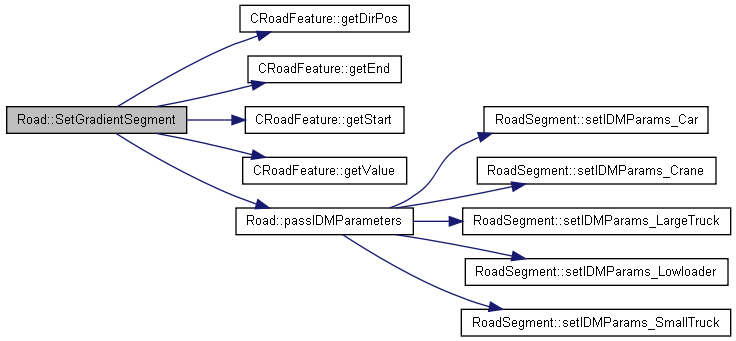
| void Road::passIDMParameters | ( | RoadSegment * | segment | ) | [private] |
Passes the IDM parameters to a given road segment.
- Parameters:
-
segment The segment to pass the parameters to
Definition at line 454 of file Road.cpp.
References m_pIDMParams_Car, m_pIDMParams_Crane, m_pIDMParams_LargeTruck, m_pIDMParams_Lowloader, m_pIDMParams_SmallTruck, RoadSegment::setIDMParams_Car(), RoadSegment::setIDMParams_Crane(), RoadSegment::setIDMParams_LargeTruck(), RoadSegment::setIDMParams_Lowloader(), and RoadSegment::setIDMParams_SmallTruck().
Referenced by SetGradientSegment(), and SetSpeedLimitSegment().
00455 { 00456 segment->setIDMParams_Car(m_pIDMParams_Car); 00457 segment->setIDMParams_Crane(m_pIDMParams_Crane); 00458 segment->setIDMParams_LargeTruck(m_pIDMParams_LargeTruck); 00459 segment->setIDMParams_Lowloader(m_pIDMParams_Lowloader); 00460 segment->setIDMParams_SmallTruck(m_pIDMParams_SmallTruck); 00461 }
| void Road::MapTrafLaneToSimLane | ( | Vehicle * | pVeh | ) | [private] |
Maps vehicles to appropriate lanes.
- Parameters:
-
pVeh The vehicle to map
Definition at line 185 of file Road.cpp.
References Vehicle::getDirection(), Vehicle::getLane(), m_NoLanes, m_TrafFileNoLanesDirNeg, m_TrafFileNoLanesDirPos, Vehicle::setLane(), and Vehicle::setTotalNoLanesInRoad().
Referenced by init(), and populate().
00186 { 00187 // first tell the vehicle how many lanes the road has for later use 00188 pVeh->setTotalNoLanesInRoad(m_NoLanes); 00189 00190 // then map its current local to global lane number 00191 if(!pVeh->getDirection()) // only if it's in the negative direction 00192 { 00193 int TrafFileNoLanes = m_TrafFileNoLanesDirPos + m_TrafFileNoLanesDirNeg; 00194 int lanesFromNegVerge = TrafFileNoLanes - pVeh->getLane(); 00195 int newLane = m_NoLanes - lanesFromNegVerge; // vehicle lane numbers are 1-based 00196 pVeh->setLane(newLane); 00197 } 00198 }
| void Road::setIDMDriverModel | ( | Vehicle * | pVeh | ) | [private] |
Sets a vehicle's drivermodel as IDM.
- Parameters:
-
pVeh The vehicle to set
Definition at line 207 of file Road.cpp.
References CIDMParameterSet::Generate(), Vehicle::getID(), m_pIDMParams_Car, m_pIDMParams_Crane, m_pIDMParams_LargeTruck, m_pIDMParams_Lowloader, m_pIDMParams_SmallTruck, Vehicle::setDriver(), VEH_ID_CAR, VEH_ID_CRANE, VEH_ID_LARGETRUCK, VEH_ID_LOWLOADER, and VEH_ID_SMALLTRUCK.
Referenced by populate().
00208 { 00209 WORD VEH_ID = pVeh->getID(); 00210 00211 switch(VEH_ID) 00212 { 00213 case VEH_ID_CAR: 00214 pVeh->setDriver( m_pIDMParams_Car->Generate() ); 00215 break; 00216 case VEH_ID_SMALLTRUCK: 00217 pVeh->setDriver( m_pIDMParams_SmallTruck->Generate() ); 00218 break; 00219 case VEH_ID_LARGETRUCK: 00220 pVeh->setDriver( m_pIDMParams_LargeTruck->Generate() ); 00221 break; 00222 case VEH_ID_CRANE: 00223 pVeh->setDriver( m_pIDMParams_Crane->Generate() ); 00224 break; 00225 case VEH_ID_LOWLOADER: 00226 pVeh->setDriver( m_pIDMParams_Lowloader->Generate() ); 00227 break; 00228 default: 00229 pVeh->setDriver( m_pIDMParams_Car->Generate() ); 00230 }; 00231 }
| void Road::SetSpeedLimitSegment | ( | CRoadFeature * | pFeat | ) | [private] |
Sets a speed limit based on data specified by the user to the GUI.
- Parameters:
-
pFeat The speed limit to create
Definition at line 495 of file Road.cpp.
References CRoadFeature::getDirPos(), CRoadFeature::getEnd(), CRoadFeature::getStart(), CRoadFeature::getValue(), m_RoadLength, m_vRoadSegmentsNeg, m_vRoadSegmentsPos, and passIDMParameters().
Referenced by SetSegmentFromFeature().
00496 { 00497 bool bDirPos = pFeat->getDirPos(); 00498 SpeedLimit* pSL; 00499 if( bDirPos ) 00500 { 00501 pSL = new SpeedLimit(pFeat->getStart(), pFeat->getEnd(), pFeat->getValue(), bDirPos); 00502 m_vRoadSegmentsPos.push_back(pSL); 00503 } 00504 else 00505 { 00506 int start = pFeat->getStart(); 00507 int end = pFeat->getEnd(); 00508 00509 pSL = new SpeedLimit(m_RoadLength - end, m_RoadLength - start, pFeat->getValue(), bDirPos); 00510 00511 m_vRoadSegmentsNeg.push_back(pSL); 00512 } 00513 passIDMParameters(pSL); 00514 }
| void Road::SetGradientSegment | ( | CRoadFeature * | pFeat | ) | [private] |
Sets a gradient based on data specified by the user to the GUI.
- Parameters:
-
pFeat The gradient to create
Definition at line 523 of file Road.cpp.
References CRoadFeature::getDirPos(), CRoadFeature::getEnd(), CRoadFeature::getStart(), CRoadFeature::getValue(), m_RoadLength, m_vRoadSegmentsNeg, m_vRoadSegmentsPos, and passIDMParameters().
Referenced by SetSegmentFromFeature().
00524 { 00525 bool bDirPos = pFeat->getDirPos(); 00526 Gradient* pGr; 00527 00528 if( bDirPos ) 00529 { 00530 pGr = new Gradient(pFeat->getStart(), pFeat->getEnd(), pFeat->getValue(), bDirPos); 00531 m_vRoadSegmentsPos.push_back(pGr); 00532 } 00533 else 00534 { 00535 int start = pFeat->getStart(); 00536 int end = pFeat->getEnd(); 00537 00538 pGr = new Gradient(m_RoadLength - end, m_RoadLength - start, pFeat->getValue(), bDirPos); 00539 00540 m_vRoadSegmentsNeg.push_back(pGr); 00541 } 00542 passIDMParameters(pGr); 00543 }
Member Data Documentation
bool Road::m_DriveOnRight [private] |
int Road::m_PercentComplete [private] |
CIDMParameterSet* Road::m_pIDMParams_Car [private] |
Definition at line 72 of file Road.h.
Referenced by clear(), passIDMParameters(), Road(), setIDMDriverModel(), setIDMParams_Car(), and ~Road().
CIDMParameterSet* Road::m_pIDMParams_SmallTruck [private] |
Definition at line 73 of file Road.h.
Referenced by clear(), passIDMParameters(), Road(), setIDMDriverModel(), setIDMParams_SmallTruck(), and ~Road().
CIDMParameterSet* Road::m_pIDMParams_LargeTruck [private] |
Definition at line 74 of file Road.h.
Referenced by clear(), passIDMParameters(), Road(), setIDMDriverModel(), setIDMParams_LargeTruck(), and ~Road().
CIDMParameterSet* Road::m_pIDMParams_Crane [private] |
Definition at line 75 of file Road.h.
Referenced by clear(), passIDMParameters(), Road(), setIDMDriverModel(), setIDMParams_Crane(), and ~Road().
CIDMParameterSet* Road::m_pIDMParams_Lowloader [private] |
Definition at line 76 of file Road.h.
Referenced by clear(), passIDMParameters(), Road(), setIDMDriverModel(), setIDMParams_Lowloader(), and ~Road().
int Road::m_LocOutputDetectorDirPos [private] |
int Road::m_LocOutputDetectorDirNeg [private] |
Direction Road::DirectionPos [private] |
Direction Road::DirectionNeg [private] |
int Road::m_TrafFileNoLanesDirPos [private] |
Definition at line 84 of file Road.h.
Referenced by MapTrafLaneToSimLane(), and setTrafFileNoLanesDirPos().
int Road::m_TrafFileNoLanesDirNeg [private] |
Definition at line 85 of file Road.h.
Referenced by MapTrafLaneToSimLane(), and setTrafFileNoLanesDirNeg().
FileHandler* Road::m_pFileHandler [private] |
Definition at line 87 of file Road.h.
Referenced by clear(), init(), initTruckGroup(), populate(), and Road().
std::vector<Vehicle*> Road::m_BufferVehicles [private] |
std::vector<Lane*> Road::m_vLanes [private] |
std::vector<Detector*> Road::m_vDetectorsPos [private] |
std::vector<Detector*> Road::m_vDetectorsNeg [private] |
std::vector<int> Road::m_vLaneLengthsPos [private] |
std::vector<int> Road::m_vLaneLengthsNeg [private] |
std::vector<RoadSegment*> Road::m_vRoadSegmentsPos [private] |
Definition at line 96 of file Road.h.
Referenced by clear(), init(), SetGradientSegment(), and SetSpeedLimitSegment().
std::vector<RoadSegment*> Road::m_vRoadSegmentsNeg [private] |
Definition at line 97 of file Road.h.
Referenced by clear(), init(), SetGradientSegment(), and SetSpeedLimitSegment().
bool Road::m_bEndOfFile [private] |
bool Road::m_AllowLaneChanging [private] |
Definition at line 100 of file Road.h.
Referenced by getAllowLaneChanging(), init(), and setAllowLaneChanging().
int Road::m_NoLanesDirPos [private] |
int Road::m_NoLanesDirNeg [private] |
int Road::m_NoDirections [private] |
Definition at line 103 of file Road.h.
Referenced by clear(), getVehicles(), init(), setNoDirections(), and update().
int Road::m_NoLanes [private] |
int Road::m_RoadLength [private] |
Definition at line 105 of file Road.h.
Referenced by getLength(), init(), populate(), SetGradientSegment(), setLocOuputDetectorDirNeg(), SetMetricDetFromStatDet(), setRoadLength(), and SetSpeedLimitSegment().
double Road::MIN_SPACE_FOR_NEXT_VEHICLE [private] |
The documentation for this class was generated from the following files:
