LaneChangeDetector Class Reference
A derived class to represent a detector that tracks lane changes. More...
#include <LaneChangeDetector.h>


Public Member Functions | |
| LaneChangeDetector (std::string dir, double dt, double dx, int roadLen, bool DirPos, WORD VehType) | |
| Constructor. | |
| virtual | ~LaneChangeDetector () |
| Destructor. | |
| virtual void | EndOutput () |
| Cleans up end of file output. | |
| void | addEvent (LaneChangeEvent *lce) |
| Adds an event to the detector. | |
Private Member Functions | |
| virtual void | InitOutputFiles () |
| Initialises the output files. | |
| virtual void | doIntervalOutput () |
| Processes output. | |
| virtual void | ReInit () |
| Re-initialises the detector after output. | |
| void | InitVerboseFile () |
| Initialises the verbose file for output. | |
| void | InitCompositionFile () |
| Initialises the composition file for output. | |
| void | InitSpaceTimeFile () |
| Initialises the space-time file for output. | |
| void | InitRateFile () |
| Initialises the rate file for output. | |
| void | doVerboseOutput () |
| Processes verbose output. | |
| void | doCompositionOutput () |
| Processes composition output. | |
| void | doSpaceTimeOutput () |
| Processes space-time output. | |
| void | doRateOutput () |
| Processes rate output. | |
| void | AddCurrentEvent (LaneChangeEvent *lce) |
Private Attributes | |
| std::vector< LaneChangeEvent * > | m_vChangeEvents |
| std::ofstream | m_OutFile_Verbose |
| std::ofstream | m_OutFile_Composition |
| std::ofstream | m_OutFile_SpaceTime |
| std::ofstream | m_OutFile_Rate |
| int | m_NoLaneChangeEvents |
| int | m_DistanceInterval |
| int | m_NoDistIntervals |
| std::vector< int > | m_vDistanceIntervals |
| std::vector< int > | m_vDistInt_LCECount |
| std::string | m_MetricsDir2 |
Detailed Description
A derived class to represent a detector that tracks lane changes.Definition at line 18 of file LaneChangeDetector.h.
Constructor & Destructor Documentation
| LaneChangeDetector::LaneChangeDetector | ( | std::string | dir, | |
| double | dt, | |||
| double | dx, | |||
| int | roadLen, | |||
| bool | DirPos, | |||
| WORD | VehType | |||
| ) |
Constructor.
- Parameters:
-
dir The detector output directory dt The time interval to use dx The distance interval to use roadLen The length of the road DirPos Whether the detector is in the positive direction VehType The type of vehicles to track
Definition at line 27 of file LaneChangeDetector.cpp.
References InitOutputFiles(), Detector::m_DetectorType, Detector::m_DirPos, m_DistanceInterval, Detector::m_MetricsDir, m_NoDistIntervals, m_NoLaneChangeEvents, Detector::m_RoadLength, Detector::m_TimeInterval, m_vDistanceIntervals, m_vDistInt_LCECount, Detector::m_VehicleType, and METRICS_TYPE_LANE_CHANGE.
00029 { 00030 m_MetricsDir = dir; 00031 m_TimeInterval = dt; 00032 m_DistanceInterval = dx; 00033 m_RoadLength = roadLen; 00034 m_DirPos = DirPos; 00035 m_VehicleType = VehType; 00036 00037 m_NoLaneChangeEvents = 0; 00038 m_DetectorType = METRICS_TYPE_LANE_CHANGE; 00039 00040 int curPos = 0; 00041 while(curPos < m_RoadLength) 00042 { 00043 m_vDistanceIntervals.push_back(curPos); 00044 curPos += m_DistanceInterval; 00045 } 00046 m_vDistanceIntervals.push_back(m_RoadLength); // enclose the last interval 00047 m_NoDistIntervals = m_vDistanceIntervals.size(); 00048 m_vDistInt_LCECount.assign(m_NoDistIntervals, 0); 00049 00050 InitOutputFiles(); 00051 }

| LaneChangeDetector::~LaneChangeDetector | ( | ) | [virtual] |
Member Function Documentation
| void LaneChangeDetector::EndOutput | ( | ) | [virtual] |
Cleans up end of file output.
Reimplemented from Detector.
Definition at line 129 of file LaneChangeDetector.cpp.
References m_OutFile_Composition, m_OutFile_Rate, m_OutFile_SpaceTime, m_OutFile_Verbose, Detector::m_VehicleType, and METRICS_VEH_ALL.
00130 { 00131 if(m_VehicleType == METRICS_VEH_ALL) 00132 m_OutFile_Composition.close(); 00133 00134 m_OutFile_Verbose.close(); 00135 m_OutFile_SpaceTime.close(); 00136 m_OutFile_Rate.close(); 00137 }
| void LaneChangeDetector::addEvent | ( | LaneChangeEvent * | pLCE | ) |
Adds an event to the detector.
- Parameters:
-
pLCE The event to add
Definition at line 77 of file LaneChangeDetector.cpp.
References AddCurrentEvent(), LaneChangeEvent::getVehicleType(), Detector::m_VehicleType, METRICS_VEH_ALL, METRICS_VEH_CAR, METRICS_VEH_CRANE, METRICS_VEH_LARGETRUCK, METRICS_VEH_LOWLOADER, METRICS_VEH_SMALLTRUCK, VEH_ID_CAR, VEH_ID_CRANE, VEH_ID_LARGETRUCK, VEH_ID_LOWLOADER, and VEH_ID_SMALLTRUCK.
Referenced by Lane::ImplementLaneChange().
00078 { 00079 WORD vehID = pLCE->getVehicleType(); 00080 00081 switch(m_VehicleType) 00082 { 00083 case METRICS_VEH_ALL: 00084 AddCurrentEvent(pLCE); 00085 break; 00086 case METRICS_VEH_CAR: 00087 if(vehID == VEH_ID_CAR) 00088 AddCurrentEvent(pLCE); 00089 break; 00090 case METRICS_VEH_SMALLTRUCK: 00091 if(vehID == VEH_ID_SMALLTRUCK) 00092 AddCurrentEvent(pLCE); 00093 break; 00094 case METRICS_VEH_LARGETRUCK: 00095 if(vehID == VEH_ID_LARGETRUCK) 00096 AddCurrentEvent(pLCE); 00097 break; 00098 case METRICS_VEH_CRANE: 00099 if(vehID == VEH_ID_CRANE) 00100 AddCurrentEvent(pLCE); 00101 break; 00102 case METRICS_VEH_LOWLOADER: 00103 if(vehID == VEH_ID_LOWLOADER) 00104 AddCurrentEvent(pLCE); 00105 break; 00106 default: 00107 AddCurrentEvent(pLCE); 00108 } 00109 }

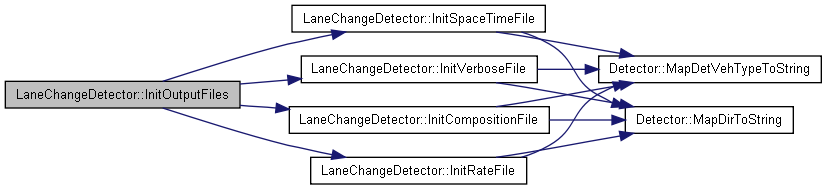
| void LaneChangeDetector::InitOutputFiles | ( | ) | [private, virtual] |
Initialises the output files.
Reimplemented from Detector.
Definition at line 60 of file LaneChangeDetector.cpp.
References InitCompositionFile(), InitRateFile(), InitSpaceTimeFile(), InitVerboseFile(), Detector::m_VehicleType, and METRICS_VEH_ALL.
Referenced by LaneChangeDetector().
00061 { 00062 if(m_VehicleType == METRICS_VEH_ALL) 00063 InitCompositionFile(); // only makes sense for all vehicles 00064 00065 InitVerboseFile(); 00066 InitSpaceTimeFile(); 00067 InitRateFile(); 00068 }
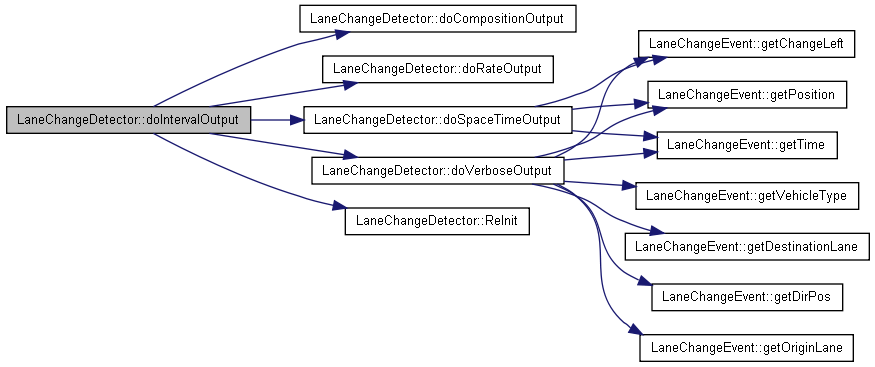
| void LaneChangeDetector::doIntervalOutput | ( | ) | [private, virtual] |
Processes output.
Reimplemented from Detector.
Definition at line 118 of file LaneChangeDetector.cpp.
References doCompositionOutput(), doRateOutput(), doSpaceTimeOutput(), doVerboseOutput(), and ReInit().
00119 { 00120 doVerboseOutput(); 00121 doCompositionOutput(); 00122 doSpaceTimeOutput(); 00123 doRateOutput(); 00124 00125 ReInit(); 00126 }
| void LaneChangeDetector::ReInit | ( | ) | [private, virtual] |
Re-initialises the detector after output.
Reimplemented from Detector.
Definition at line 140 of file LaneChangeDetector.cpp.
References m_NoDistIntervals, m_NoLaneChangeEvents, m_vChangeEvents, and m_vDistInt_LCECount.
Referenced by doIntervalOutput().
00141 { 00142 m_NoLaneChangeEvents = 0; 00143 00144 m_vDistInt_LCECount.clear(); 00145 m_vDistInt_LCECount.assign(m_NoDistIntervals, 0); 00146 00147 for(int i = 0; i < m_vChangeEvents.size(); i++) 00148 delete m_vChangeEvents.at(i); 00149 m_vChangeEvents.clear(); 00150 00151 }
| void LaneChangeDetector::InitVerboseFile | ( | ) | [private] |
Initialises the verbose file for output.
Definition at line 154 of file LaneChangeDetector.cpp.
References Detector::m_DirPos, Detector::m_MetricsDir, m_OutFile_Verbose, Detector::m_VehicleType, Detector::MapDetVehTypeToString(), and Detector::MapDirToString().
Referenced by InitOutputFiles().
00155 { 00156 std::string file; 00157 file = m_MetricsDir; 00158 file += "LC_All_" + MapDetVehTypeToString(m_VehicleType) + "_" 00159 + MapDirToString(m_DirPos) + ".csv"; 00160 00161 m_OutFile_Verbose.open(file.c_str(), std::ios::out); 00162 00163 m_OutFile_Verbose << "LANE CHANGE - VERBOSE OUTPUT OF EVENTS" << '\n'; 00164 m_OutFile_Verbose << "Time,"; 00165 m_OutFile_Verbose << "Position,"; 00166 m_OutFile_Verbose << "From Lane,"; 00167 m_OutFile_Verbose << "To Lane,"; 00168 m_OutFile_Verbose << "Right/Left,"; 00169 m_OutFile_Verbose << "Type" << '\n'; 00170 m_OutFile_Verbose << std::endl; 00171 }

| void LaneChangeDetector::InitCompositionFile | ( | ) | [private] |
Initialises the composition file for output.
Definition at line 174 of file LaneChangeDetector.cpp.
References Detector::m_DirPos, Detector::m_MetricsDir, m_OutFile_Composition, Detector::m_VehicleType, Detector::MapDetVehTypeToString(), and Detector::MapDirToString().
Referenced by InitOutputFiles().
00175 { 00176 std::string file; 00177 file = m_MetricsDir; 00178 file += "LC_Comp_" + MapDetVehTypeToString(m_VehicleType) + "_" 00179 + MapDirToString(m_DirPos) + ".csv"; 00180 00181 m_OutFile_Composition.open(file.c_str(), std::ios::out); 00182 00183 m_OutFile_Composition << "LANE CHANGE - COMPOSITION OF EVENTS" << "\n"; 00184 m_OutFile_Composition << "Time Interval" << ","; 00185 m_OutFile_Composition << "Car Changes" << ","; 00186 m_OutFile_Composition << "SmallTr Changes" << ","; 00187 m_OutFile_Composition << "LargeTr Changes" << ","; 00188 m_OutFile_Composition << "Crane Changes" << ","; 00189 m_OutFile_Composition << "LowLoad Changes" << '\n'; 00190 00191 }

| void LaneChangeDetector::InitSpaceTimeFile | ( | ) | [private] |
Initialises the space-time file for output.
Definition at line 194 of file LaneChangeDetector.cpp.
References Detector::m_DirPos, Detector::m_MetricsDir, m_OutFile_SpaceTime, Detector::m_VehicleType, Detector::MapDetVehTypeToString(), and Detector::MapDirToString().
Referenced by InitOutputFiles().
00195 { 00196 std::string file; 00197 file = m_MetricsDir; 00198 file += "LC_ST_" + MapDetVehTypeToString(m_VehicleType) + "_" 00199 + MapDirToString(m_DirPos) + ".csv"; 00200 00201 m_OutFile_SpaceTime.open(file.c_str(), std::ios::out); 00202 00203 m_OutFile_SpaceTime << "LANE CHANGE - SPACE TIME OF EVENTS" << '\n'; 00204 m_OutFile_SpaceTime << "Left To Right," << ',' << "Right To Left" << '\n'; 00205 m_OutFile_SpaceTime << "Time (s),Location (m),Time (s),Location (m)" << '\n'; 00206 }

| void LaneChangeDetector::InitRateFile | ( | ) | [private] |
Initialises the rate file for output.
Definition at line 209 of file LaneChangeDetector.cpp.
References Detector::m_DirPos, Detector::m_MetricsDir, m_NoDistIntervals, m_OutFile_Rate, m_vDistanceIntervals, Detector::m_VehicleType, Detector::MapDetVehTypeToString(), and Detector::MapDirToString().
Referenced by InitOutputFiles().
00210 { 00211 std::string file; 00212 file = m_MetricsDir; 00213 file += "LC_Rate_" + MapDetVehTypeToString(m_VehicleType) + "_" 00214 + MapDirToString(m_DirPos) + ".csv"; 00215 00216 m_OutFile_Rate.open(file.c_str(), std::ios::out); 00217 00218 m_OutFile_Rate << "LANE CHANGE - RATES BY LOCATION AND TIME" << '\n'; 00219 m_OutFile_Rate << "Time (s),Location (m)" << '\n'; 00220 m_OutFile_Rate << ","; 00221 for(int i = 0; i < m_NoDistIntervals; i++) 00222 m_OutFile_Rate << m_vDistanceIntervals[i] << ","; 00223 m_OutFile_Rate << '\n'; 00224 }

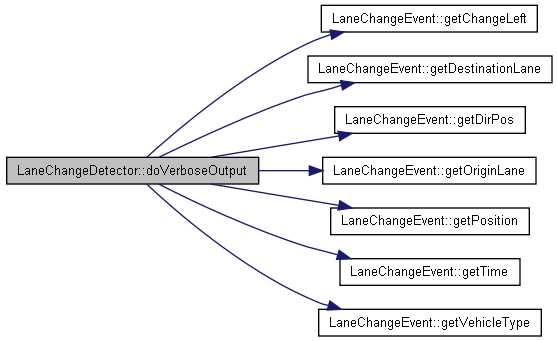
| void LaneChangeDetector::doVerboseOutput | ( | ) | [private] |
Processes verbose output.
Definition at line 227 of file LaneChangeDetector.cpp.
References LaneChangeEvent::getChangeLeft(), LaneChangeEvent::getDestinationLane(), LaneChangeEvent::getDirPos(), LaneChangeEvent::getOriginLane(), LaneChangeEvent::getPosition(), LaneChangeEvent::getTime(), LaneChangeEvent::getVehicleType(), m_NoLaneChangeEvents, m_OutFile_Verbose, m_vChangeEvents, VEH_ID_CAR, VEH_ID_CRANE, VEH_ID_LARGETRUCK, VEH_ID_LOWLOADER, and VEH_ID_SMALLTRUCK.
Referenced by doIntervalOutput().
00228 { 00229 for(int i = 0; i < m_NoLaneChangeEvents; i++) 00230 { 00231 LaneChangeEvent* curEvent = m_vChangeEvents.at(i); 00232 00233 std::string change = (curEvent->getChangeLeft()) ? "Left" : "Right"; 00234 std::string dir = (curEvent->getDirPos()) ? "Pos" : "Neg"; 00235 00236 std::string type; 00237 00238 switch(curEvent->getVehicleType()) 00239 { 00240 case VEH_ID_CAR: type = "Car"; break; 00241 case VEH_ID_SMALLTRUCK: type = "SmallTr"; break; 00242 case VEH_ID_LARGETRUCK: type = "LargeTr"; break; 00243 case VEH_ID_CRANE: type = "Crane"; break; 00244 case VEH_ID_LOWLOADER: type = "Lowload"; break; 00245 } 00246 00247 m_OutFile_Verbose << curEvent->getTime() << " ," 00248 << curEvent->getPosition() << " ," 00249 << curEvent->getOriginLane() << " ," 00250 << curEvent->getDestinationLane() << " ," 00251 << change << " ," 00252 << type << '\n'; 00253 } 00254 }
| void LaneChangeDetector::doCompositionOutput | ( | ) | [private] |
Processes composition output.
Definition at line 257 of file LaneChangeDetector.cpp.
References m_NoLaneChangeEvents, m_OutFile_Composition, Detector::m_TotalTime, m_vChangeEvents, VEH_ID_CAR, VEH_ID_CRANE, VEH_ID_LARGETRUCK, VEH_ID_LOWLOADER, and VEH_ID_SMALLTRUCK.
Referenced by doIntervalOutput().
00258 { 00259 int nCar = 0; 00260 int nSmallTruck = 0; 00261 int nLargeTruck = 0; 00262 int nCrane = 0; 00263 int nLowLoader = 0; 00264 00265 for(int i = 0; i < m_NoLaneChangeEvents; i++) 00266 { 00267 WORD VehType = m_vChangeEvents.at(i)->getVehicleType(); 00268 00269 switch(VehType) 00270 { 00271 case VEH_ID_CAR: nCar++; break; 00272 case VEH_ID_SMALLTRUCK: nSmallTruck++; break; 00273 case VEH_ID_LARGETRUCK: nLargeTruck++; break; 00274 case VEH_ID_CRANE: nCrane++; break; 00275 case VEH_ID_LOWLOADER: nLowLoader++; break; 00276 default: nCar++; 00277 } 00278 } 00279 00280 m_OutFile_Composition << m_TotalTime << ","; 00281 m_OutFile_Composition << nCar << ","; 00282 m_OutFile_Composition << nSmallTruck << ","; 00283 m_OutFile_Composition << nLargeTruck << ","; 00284 m_OutFile_Composition << nCrane << ","; 00285 m_OutFile_Composition << nLowLoader << '\n'; 00286 }
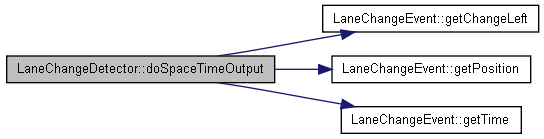
| void LaneChangeDetector::doSpaceTimeOutput | ( | ) | [private] |
Processes space-time output.
Definition at line 289 of file LaneChangeDetector.cpp.
References LaneChangeEvent::getChangeLeft(), LaneChangeEvent::getPosition(), LaneChangeEvent::getTime(), m_NoLaneChangeEvents, m_OutFile_SpaceTime, and m_vChangeEvents.
Referenced by doIntervalOutput().
00290 { 00291 for(int i = 0; i < m_NoLaneChangeEvents; i++) 00292 { 00293 LaneChangeEvent* pLCE = m_vChangeEvents.at(i); 00294 double time = pLCE->getTime(); 00295 double position = pLCE->getPosition(); 00296 bool bChangeToLeft = pLCE->getChangeLeft(); 00297 00298 if(bChangeToLeft) // send to right hand column 00299 m_OutFile_SpaceTime << ",,"; 00300 00301 m_OutFile_SpaceTime << time << ',' << position << '\n'; 00302 } 00303 }
| void LaneChangeDetector::doRateOutput | ( | ) | [private] |
Processes rate output.
Definition at line 306 of file LaneChangeDetector.cpp.
References m_DistanceInterval, m_NoDistIntervals, m_NoLaneChangeEvents, m_OutFile_Rate, Detector::m_TimeInterval, Detector::m_TotalTime, m_vChangeEvents, m_vDistanceIntervals, m_vDistInt_LCECount, and SECS_PER_HOUR.
Referenced by doIntervalOutput().
00307 { 00308 for(int i = 0; i < m_NoLaneChangeEvents; i++) 00309 { 00310 double position = m_vChangeEvents.at(i)->getPosition(); 00311 int iDistInterval = 0; 00312 // find the interval to be incremented 00313 while( !(position < m_vDistanceIntervals[iDistInterval]) ) 00314 iDistInterval++; 00315 00316 m_vDistInt_LCECount[iDistInterval]++; // count it 00317 } 00318 00319 double deltaX = (double)m_DistanceInterval/1000; // change to km 00320 double deltaT = (double)m_TimeInterval/SECS_PER_HOUR; // change to hour 00321 00322 m_OutFile_Rate << m_TotalTime; 00323 for(i = 0; i < m_NoDistIntervals; i++) 00324 { 00325 double n = m_vDistInt_LCECount[i]; 00326 double rate = n/(deltaX*deltaT); 00327 m_OutFile_Rate << ',' << rate; 00328 } 00329 m_OutFile_Rate << '\n'; 00330 }
| void LaneChangeDetector::AddCurrentEvent | ( | LaneChangeEvent * | lce | ) | [private] |
Definition at line 111 of file LaneChangeDetector.cpp.
References m_NoLaneChangeEvents, and m_vChangeEvents.
Referenced by addEvent().
00112 { 00113 m_vChangeEvents.push_back(lce); 00114 m_NoLaneChangeEvents++; 00115 }
Member Data Documentation
std::vector<LaneChangeEvent*> LaneChangeDetector::m_vChangeEvents [private] |
Definition at line 46 of file LaneChangeDetector.h.
Referenced by AddCurrentEvent(), doCompositionOutput(), doRateOutput(), doSpaceTimeOutput(), doVerboseOutput(), and ReInit().
std::ofstream LaneChangeDetector::m_OutFile_Verbose [private] |
Definition at line 48 of file LaneChangeDetector.h.
Referenced by doVerboseOutput(), EndOutput(), and InitVerboseFile().
std::ofstream LaneChangeDetector::m_OutFile_Composition [private] |
Definition at line 49 of file LaneChangeDetector.h.
Referenced by doCompositionOutput(), EndOutput(), and InitCompositionFile().
std::ofstream LaneChangeDetector::m_OutFile_SpaceTime [private] |
Definition at line 50 of file LaneChangeDetector.h.
Referenced by doSpaceTimeOutput(), EndOutput(), and InitSpaceTimeFile().
std::ofstream LaneChangeDetector::m_OutFile_Rate [private] |
Definition at line 51 of file LaneChangeDetector.h.
Referenced by doRateOutput(), EndOutput(), and InitRateFile().
int LaneChangeDetector::m_NoLaneChangeEvents [private] |
Definition at line 53 of file LaneChangeDetector.h.
Referenced by AddCurrentEvent(), doCompositionOutput(), doRateOutput(), doSpaceTimeOutput(), doVerboseOutput(), LaneChangeDetector(), and ReInit().
int LaneChangeDetector::m_DistanceInterval [private] |
Definition at line 54 of file LaneChangeDetector.h.
Referenced by doRateOutput(), and LaneChangeDetector().
int LaneChangeDetector::m_NoDistIntervals [private] |
Definition at line 55 of file LaneChangeDetector.h.
Referenced by doRateOutput(), InitRateFile(), LaneChangeDetector(), and ReInit().
std::vector<int> LaneChangeDetector::m_vDistanceIntervals [private] |
Definition at line 56 of file LaneChangeDetector.h.
Referenced by doRateOutput(), InitRateFile(), and LaneChangeDetector().
std::vector<int> LaneChangeDetector::m_vDistInt_LCECount [private] |
Definition at line 57 of file LaneChangeDetector.h.
Referenced by doRateOutput(), LaneChangeDetector(), and ReInit().
std::string LaneChangeDetector::m_MetricsDir2 [private] |
Definition at line 59 of file LaneChangeDetector.h.
The documentation for this class was generated from the following files:
- D:/~Research/Code/C++/EvolveTraffic/LaneChangeDetector.h
- D:/~Research/Code/C++/EvolveTraffic/LaneChangeDetector.cpp
