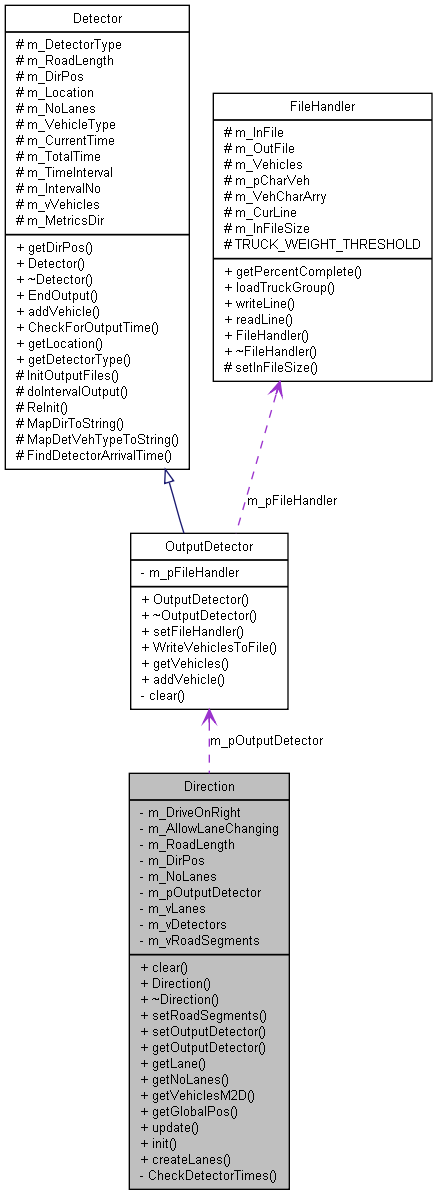
Direction Class Reference
A class representing a direction in a road. More...
#include <Direction.h>
Public Member Functions | |
| void | clear () |
| Clears the direction so it can be used in another simulation. | |
| Direction () | |
| Default constructor. | |
| virtual | ~Direction () |
| Default destructor. | |
| void | setRoadSegments (std::vector< RoadSegment * > segments) |
| void | setOutputDetector (OutputDetector *OutputDet) |
| Sets the direction's output detector. | |
| OutputDetector * | getOutputDetector () |
| Gets the direction's output detector. | |
| Lane & | getLane (int i) |
| Gets a specific lane. | |
| int | getNoLanes () |
| Gets the number of lanes. | |
| M2D | getVehiclesM2D () |
| Gets all the vehicles on the road. | |
| M2D | getGlobalPos () |
| Updates all the vehicle positions to take account of direction. | |
| bool | update (const double step, const double curTime) |
| Handles the updating of all the lanes in the direction. | |
| void | init (bool DirPos, OutputDetector *OutDet, bool AllowLaneChange, int RoadLength, bool DriveOnRight) |
| Initialises the direction. | |
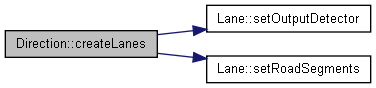
| void | createLanes (int iFirstLane, std::vector< int > vLaneLengths, std::vector< Detector * > detectors, std::vector< RoadSegment * > segments) |
| Creates all the lanes running in a particular direction. | |
Private Member Functions | |
| void | CheckDetectorTimes (double step) |
| Checks all the detectors for their output times. | |
Private Attributes | |
| bool | m_DriveOnRight |
| bool | m_AllowLaneChanging |
| double | m_RoadLength |
| bool | m_DirPos |
| int | m_NoLanes |
| OutputDetector * | m_pOutputDetector |
| std::vector< Lane > | m_vLanes |
| std::vector< Detector * > | m_vDetectors |
| std::vector< RoadSegment * > | m_vRoadSegments |
Detailed Description
A class representing a direction in a road.Definition at line 13 of file Direction.h.
Constructor & Destructor Documentation
| Direction::Direction | ( | ) |
Default constructor.
Definition at line 6 of file Direction.cpp.
References m_pOutputDetector.
00007 { 00008 m_pOutputDetector = NULL; 00009 }
| Direction::~Direction | ( | ) | [virtual] |
Default destructor.
Definition at line 12 of file Direction.cpp.
References m_vDetectors, and m_vRoadSegments.
00013 { 00014 int i; 00015 00016 // Delete all of this direction's metrics detectors 00017 for(i = 0; i < m_vDetectors.size(); i++) 00018 delete m_vDetectors.at(i); 00019 00020 00021 // Delete all of this direction's special segments 00022 for(i = 0; i < m_vRoadSegments.size(); i++) 00023 delete m_vRoadSegments.at(i); 00024 00025 }
Member Function Documentation
| void Direction::clear | ( | ) |
Clears the direction so it can be used in another simulation.
This function clears all of the direction's information so that it may be used in another simulation without re-instanciating.
Definition at line 220 of file Direction.cpp.
References m_pOutputDetector, m_vDetectors, m_vLanes, and m_vRoadSegments.
Referenced by Road::clear().
00221 { 00222 int i; 00223 00224 for(i = 0; i < m_vLanes.size(); i++) 00225 m_vLanes.at(i).clear(); 00226 00227 m_vLanes.clear(); 00228 00229 delete m_pOutputDetector; // Delete this direction's output detector 00230 00231 // Delete all of this direction's metrics detectors 00232 for(i = 0; i < m_vDetectors.size(); i++) 00233 delete m_vDetectors.at(i); 00234 00235 m_vDetectors.clear(); 00236 00237 // Delete all of this direction's special segments 00238 for(i = 0; i < m_vRoadSegments.size(); i++) 00239 delete m_vRoadSegments.at(i); 00240 00241 m_vRoadSegments.clear(); 00242 }
| void Direction::setRoadSegments | ( | std::vector< RoadSegment * > | segments | ) |
| void Direction::setOutputDetector | ( | OutputDetector * | OutputDet | ) |
Sets the direction's output detector.
- Parameters:
-
OutputDet The direction's output detector
Definition at line 196 of file Direction.cpp.
References m_pOutputDetector.
00197 { 00198 m_pOutputDetector = OutputDet; 00199 }
| OutputDetector * Direction::getOutputDetector | ( | ) |
Gets the direction's output detector.
- Returns:
- The direction's output detector
Definition at line 187 of file Direction.cpp.
References m_pOutputDetector.
00188 { 00189 return m_pOutputDetector; 00190 }
| Lane & Direction::getLane | ( | int | i | ) |
Gets a specific lane.
- Parameters:
-
i The lane to choose
- Returns:
- The chosen lane
Definition at line 178 of file Direction.cpp.
References m_vLanes.
Referenced by Road::init().
00179 { 00180 return m_vLanes.at(i); 00181 }
| int Direction::getNoLanes | ( | ) |
Gets the number of lanes.
- Returns:
- The number of lanes
Definition at line 168 of file Direction.cpp.
References m_NoLanes.
Referenced by Road::init().
00169 { 00170 return m_NoLanes; 00171 }
| M2D Direction::getVehiclesM2D | ( | ) |
Gets all the vehicles on the road.
- Returns:
- All the vehicles on the road
Definition at line 151 of file Direction.cpp.
References m_NoLanes, and m_vLanes.
Referenced by getGlobalPos().
00152 { 00153 // returns vehicles for position from the start of the lane extraction 00154 M2D vVeh2D; 00155 00156 for(int i = 0; i < m_NoLanes; i++) 00157 { 00158 std::vector<Vehicle*> temp = m_vLanes[i].getPos(); 00159 vVeh2D.push_back(temp); 00160 } 00161 return vVeh2D; 00162 }
| M2D Direction::getGlobalPos | ( | ) |
Updates all the vehicle positions to take account of direction.
- Returns:
- All adjusted vehicle positions
Definition at line 130 of file Direction.cpp.
References getVehiclesM2D(), m_DirPos, m_NoLanes, and m_vLanes.
Referenced by Road::getVehicles().
00131 { 00132 // this modifies the lane position to take accound of direction 00133 M2D vVeh2D = getVehiclesM2D(); 00134 00135 if(!m_DirPos) // if in negative x-direction 00136 { 00137 for(int i = 0; i < m_NoLanes; i++) 00138 { 00139 int d2 = vVeh2D[i].size(); 00140 for(int j = 0; j < d2; j++) 00141 vVeh2D[i][j]->setRoadPos( m_vLanes[i].getLength() - vVeh2D[i][j]->getPos() ); 00142 } 00143 } 00144 return vVeh2D; 00145 }

| bool Direction::update | ( | const double | step, | |
| const double | curTime | |||
| ) |
Handles the updating of all the lanes in the direction.
- Parameters:
-
step The timestep curTime The current simulation time
- Returns:
- Whether or not the direction is empty
Definition at line 37 of file Direction.cpp.
References CheckDetectorTimes(), m_NoLanes, m_pOutputDetector, m_vLanes, and OutputDetector::WriteVehiclesToFile().
Referenced by Road::update().
00038 { 00039 CheckDetectorTimes(step); // check if it's time to output what we have 00040 bool DirectionEmpty = false; 00041 int NoEmptyLanes = 0; 00042 for(int i = 0; i < m_NoLanes; i++) 00043 { 00044 bool laneEmpty = m_vLanes[i].update(step, curTime); 00045 if(laneEmpty) 00046 NoEmptyLanes++; 00047 } 00048 00049 // output any vehicles past the detector 00050 m_pOutputDetector->WriteVehiclesToFile(); 00051 00052 if(NoEmptyLanes == m_NoLanes) 00053 DirectionEmpty = true; 00054 00055 return DirectionEmpty; 00056 }

| void Direction::init | ( | bool | DirPos, | |
| OutputDetector * | pOutDet, | |||
| bool | AllowLaneChange, | |||
| int | RoadLength, | |||
| bool | DriveOnRight | |||
| ) |
Initialises the direction.
- Parameters:
-
DirPos Whether or not the direction is in a positive direction pOutDet The direction's output detector AllowLaneChange Whether or not lane changing is allowed RoadLength The length of the road DriveOnRight Whether or not vehicles drive on the right
Definition at line 66 of file Direction.cpp.
References m_AllowLaneChanging, m_DirPos, m_DriveOnRight, m_pOutputDetector, and m_RoadLength.
Referenced by Road::init().
00067 { 00068 m_DirPos = DirPos; 00069 m_pOutputDetector = pOutDet; 00070 m_AllowLaneChanging = AllowLaneChange; 00071 m_RoadLength = RoadLength; 00072 m_DriveOnRight = DriveOnRight; 00073 }
| void Direction::createLanes | ( | int | iFirstLane, | |
| std::vector< int > | vLaneLengths, | |||
| std::vector< Detector * > | detectors, | |||
| std::vector< RoadSegment * > | segments | |||
| ) |
Creates all the lanes running in a particular direction.
- Parameters:
-
iFirstLane The index of the first lane in this direction vLaneLengths The number of lanes to create detectors The detectors in the direction segments The segments in this direction
Definition at line 86 of file Direction.cpp.
References m_AllowLaneChanging, m_DirPos, m_DriveOnRight, m_NoLanes, m_pOutputDetector, m_vDetectors, m_vLanes, m_vRoadSegments, Lane::setOutputDetector(), and Lane::setRoadSegments().
Referenced by Road::init().
00088 { 00089 m_NoLanes = vLaneLengths.size(); 00090 m_vDetectors = detectors; 00091 m_vRoadSegments = segments; 00092 00093 for(int i = 0; i < m_NoLanes; i++) 00094 { 00095 Lane lane(iFirstLane + i, vLaneLengths[i], m_vDetectors, m_DirPos, m_AllowLaneChanging); 00096 lane.setOutputDetector(m_pOutputDetector); 00097 lane.setRoadSegments(m_vRoadSegments); 00098 m_vLanes.push_back(lane); 00099 } 00100 00101 // set adjacent lanes if more than 1 lane 00102 if(m_NoLanes > 1) 00103 { 00104 // If(DRIVE_ON_RIGHT), lanes are numbered from the BTM of the screen as: 00105 // Dir Pos - 0, 1, 2, 3 - Dir Neg - 4, 5, 6, 7 00106 // else lanes are numbered from the TOP of the screen 00107 if(m_DriveOnRight) 00108 { 00109 for(i = 0; i < m_NoLanes - 1; i++) 00110 m_vLanes.at(i).setLeftLane(&m_vLanes.at(i+1)); // next lane up the screen 00111 for(i = 1; i < m_NoLanes; i++) 00112 m_vLanes.at(i).setRightLane(&m_vLanes.at(i-1)); // one down the screen 00113 } 00114 else 00115 { 00116 for(i = 0; i < m_NoLanes - 1; i++) 00117 m_vLanes.at(i).setRightLane(&m_vLanes.at(i+1)); // next lane down the screen 00118 for(i = 1; i < m_NoLanes; i++) 00119 m_vLanes.at(i).setLeftLane(&m_vLanes.at(i-1)); // next one up the screen 00120 } 00121 } 00122 }
| void Direction::CheckDetectorTimes | ( | double | step | ) | [private] |
Checks all the detectors for their output times.
- Parameters:
-
step The timestep
Definition at line 208 of file Direction.cpp.
References m_vDetectors.
Referenced by update().
00209 { 00210 for(int i = 0; i < m_vDetectors.size(); i++) 00211 { 00212 m_vDetectors.at(i)->CheckForOutputTime(step); 00213 } 00214 }
Member Data Documentation
bool Direction::m_DriveOnRight [private] |
bool Direction::m_AllowLaneChanging [private] |
double Direction::m_RoadLength [private] |
bool Direction::m_DirPos [private] |
int Direction::m_NoLanes [private] |
Definition at line 43 of file Direction.h.
Referenced by createLanes(), getGlobalPos(), getNoLanes(), getVehiclesM2D(), and update().
OutputDetector* Direction::m_pOutputDetector [private] |
Definition at line 45 of file Direction.h.
Referenced by clear(), createLanes(), Direction(), getOutputDetector(), init(), setOutputDetector(), and update().
std::vector<Lane> Direction::m_vLanes [private] |
Definition at line 46 of file Direction.h.
Referenced by clear(), createLanes(), getGlobalPos(), getLane(), getVehiclesM2D(), and update().
std::vector<Detector*> Direction::m_vDetectors [private] |
Definition at line 47 of file Direction.h.
Referenced by CheckDetectorTimes(), clear(), createLanes(), and ~Direction().
std::vector<RoadSegment*> Direction::m_vRoadSegments [private] |
The documentation for this class was generated from the following files:
- D:/~Research/Code/C++/EvolveTraffic/Direction.h
- D:/~Research/Code/C++/EvolveTraffic/Direction.cpp
