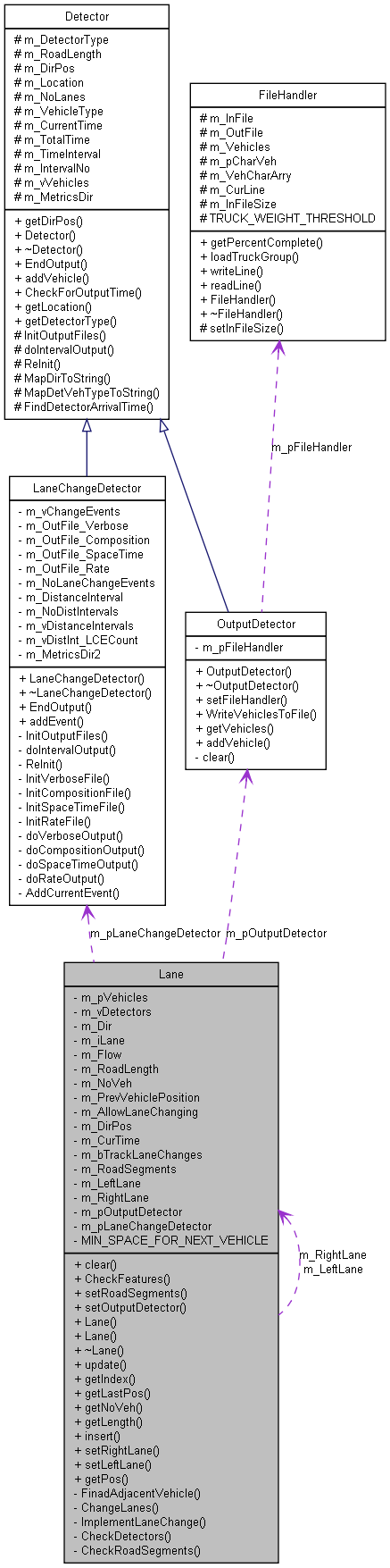
Lane Class Reference
A class representing a lane in a road. More...
#include <Lane.h>
Public Member Functions | |
| void | clear () |
| Clears the lane so it can be used in another simulation. | |
| void | CheckFeatures (const double curTime, double prevPosition, double curPosition, Vehicle *pVeh) |
| Checks all features on the road. | |
| void | setRoadSegments (std::vector< RoadSegment * > segments) |
| Sets the road segments for the direction. | |
| void | setOutputDetector (OutputDetector *out) |
| Sets the output detector for the direction. | |
| Lane () | |
| Default constructor. | |
| Lane (int iLane, int length, std::vector< Detector * > detectors, bool DirPos, bool AllowLaneChange) | |
| Main constructor. | |
| virtual | ~Lane () |
| Default destructor. | |
| bool | update (const double step, const double curTime) |
| Updates the positions of all Vehicles in the Lane. | |
| int | getIndex () |
| Gets the index of the lane. | |
| double | getLastPos () |
| Gets the position of the last vehicle in the lane. | |
| int | getNoVeh () |
| Gets the number of vehicles in the lane. | |
| double | getLength () |
| Gets the length of the Lane. | |
| void | insert (int i, Vehicle *pVeh) |
| Inserts a Vehicle into the Lane. | |
| void | setRightLane (Lane *right) |
Sets a pointer to the Lane to the right of the current Lane The Lane index is in global coords:
| |
| void | setLeftLane (Lane *left) |
Sets a pointer to the Lane to the left of the current Lane The Lane index is in global coords:
| |
| std::vector< Vehicle * > | getPos () |
| Gets all the Vehicles currently in the Lane. | |
Private Member Functions | |
| Vehicle * | FinadAdjacentVehicle (Lane *AdjacentLane, double location, bool front, int *iAdjacentLane=NULL) |
| Finds a vehicle in the adjacent lane. | |
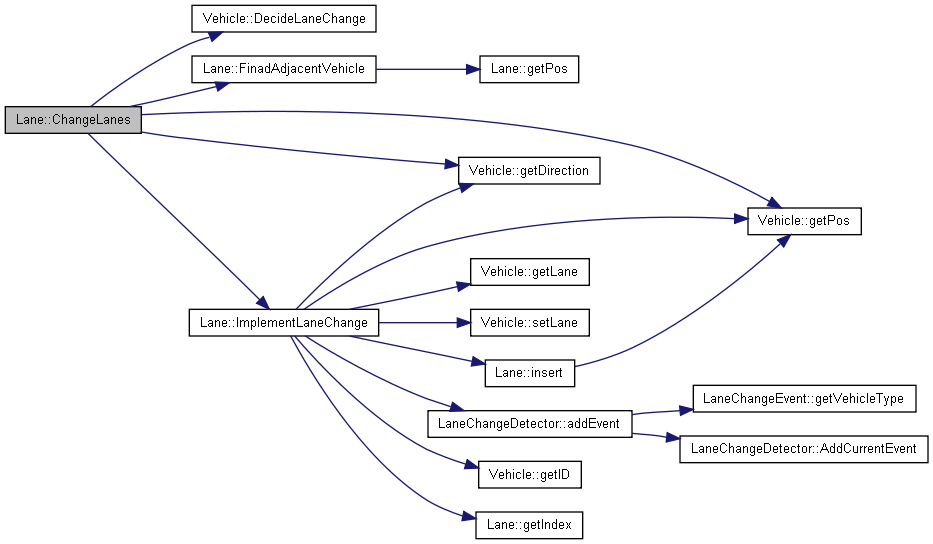
| Lane * | ChangeLanes (Vehicle *pVeh) |
| Changes a Vehicle's Lane if advantageous and possible. | |
| Lane * | ImplementLaneChange (Vehicle *pVeh, int LaneChangeID, int iVehLeftLane, int iVehRightLane) |
| Changes a vehicle to another lane. | |
| void | CheckDetectors (const double curTime, double prevPosition, double curPosition, Vehicle *pVeh) |
| Adds a vehicle to the detectors list of vehicles for that step. | |
| void | CheckRoadSegments (double prevPosition, double curPosition, Vehicle *pVeh) |
| Checks whether a vehicle has entered or exited any road segments. | |
Private Attributes | |
| std::vector< Vehicle * > | m_pVehicles |
| std::vector< Detector * > | m_vDetectors |
| int | m_Dir |
| int | m_iLane |
| double | m_Flow |
| double | m_RoadLength |
| int | m_NoVeh |
| double | m_PrevVehiclePosition |
| bool | m_AllowLaneChanging |
| bool | m_DirPos |
| double | m_CurTime |
| bool | m_bTrackLaneChanges |
| std::vector< RoadSegment * > | m_RoadSegments |
| Lane * | m_LeftLane |
| Lane * | m_RightLane |
| OutputDetector * | m_pOutputDetector |
| LaneChangeDetector * | m_pLaneChangeDetector |
| double | MIN_SPACE_FOR_NEXT_VEHICLE |
Detailed Description
A class representing a lane in a road.Definition at line 24 of file Lane.h.
Constructor & Destructor Documentation
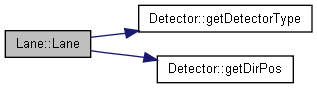
| Lane::Lane | ( | ) |
Default constructor.
Definition at line 16 of file Lane.cpp.
References m_LeftLane, and m_RightLane.
00017 { 00018 m_LeftLane = NULL; 00019 m_RightLane = NULL; 00020 }
| Lane::Lane | ( | int | iLane, | |
| int | RoadLength, | |||
| std::vector< Detector * > | detectors, | |||
| bool | DirPos, | |||
| bool | AllowLaneChange | |||
| ) |
Main constructor.
The main constructor used for creating a Lane object.
- Parameters:
-
iLane The lane's index RoadLength The length of the Road detectors The detectors to be used in the lane DirPos Whether the lane is in the positive direction or not AllowLaneChange Whether lane changing is allowed
Definition at line 38 of file Lane.cpp.
References Detector::getDetectorType(), Detector::getDirPos(), CConfigData::IDM, m_AllowLaneChanging, m_bTrackLaneChanges, m_DirPos, m_iLane, m_LeftLane, m_NoVeh, m_pLaneChangeDetector, m_PrevVehiclePosition, m_RightLane, m_RoadLength, m_vDetectors, METRICS_TYPE_LANE_CHANGE, CConfigData::IDM_Config::MIN_SPACE_FOR_NEXT_VEHICLE, and MIN_SPACE_FOR_NEXT_VEHICLE.
00039 { 00040 00041 MIN_SPACE_FOR_NEXT_VEHICLE = g_ConfigData.IDM.MIN_SPACE_FOR_NEXT_VEHICLE; 00042 m_PrevVehiclePosition = MIN_SPACE_FOR_NEXT_VEHICLE; 00043 00044 m_NoVeh = 0; 00045 m_RoadLength = RoadLength; 00046 m_LeftLane = NULL; 00047 m_RightLane = NULL; 00048 m_bTrackLaneChanges = false; 00049 00050 m_iLane = iLane; 00051 m_vDetectors = detectors; 00052 m_DirPos = DirPos; 00053 m_AllowLaneChanging = AllowLaneChange; 00054 00055 for(int i = 0; i < m_vDetectors.size(); i++) 00056 { 00057 Detector* pDet = m_vDetectors.at(i); 00058 if( (pDet->getDetectorType() == METRICS_TYPE_LANE_CHANGE) && (pDet->getDirPos() == m_DirPos) ) 00059 { 00060 m_bTrackLaneChanges = true; 00061 m_pLaneChangeDetector = dynamic_cast<LaneChangeDetector*>(pDet); 00062 break; 00063 } 00064 } 00065 }
| Lane::~Lane | ( | ) | [virtual] |
Member Function Documentation
| void Lane::clear | ( | ) |
Clears the lane so it can be used in another simulation.
This function clears all of the lane's information so that it may be used in another simulation without re-instanciating.
Definition at line 529 of file Lane.cpp.
References m_pVehicles, m_RoadSegments, and m_vDetectors.
00530 { 00531 00532 // If we exit in mid-sim, clear all vehicles currently on the road 00533 for(int i = 0; i < m_pVehicles.size(); i++) 00534 delete m_pVehicles.at(i); 00535 00536 // Free the vector for vehicles 00537 m_pVehicles.clear(); 00538 00539 // Free the vectors for detectors and segments (both deleted in direction) 00540 m_vDetectors.clear(); 00541 m_RoadSegments.clear(); 00542 }
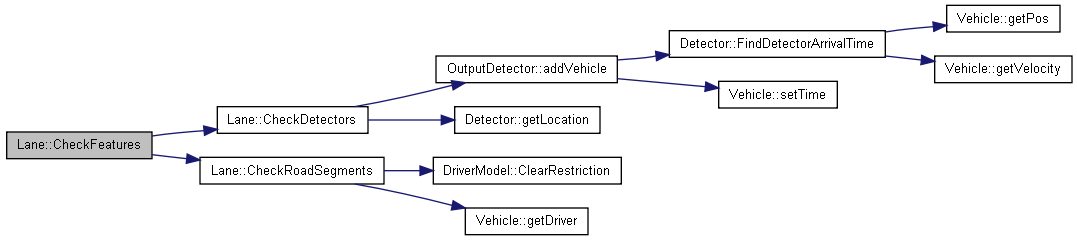
| void Lane::CheckFeatures | ( | const double | curTime, | |
| double | prevPosition, | |||
| double | curPosition, | |||
| Vehicle * | pVeh | |||
| ) |
Checks all features on the road.
- Parameters:
-
curTime The current time prevPosition The vehicle's position in the previous step curPosition The vehicle's current position pVeh The vehicle
- See also:
- CheckDetectors()
Definition at line 161 of file Lane.cpp.
References CheckDetectors(), and CheckRoadSegments().
Referenced by update().
00162 { 00163 CheckDetectors(curTime, prevPosition, curPosition, pVeh); 00164 CheckRoadSegments(prevPosition, curPosition, pVeh); 00165 }
| void Lane::setRoadSegments | ( | std::vector< RoadSegment * > | segments | ) |
Sets the road segments for the direction.
- Parameters:
-
segments The road segments
Definition at line 464 of file Lane.cpp.
References m_RoadSegments.
Referenced by Direction::createLanes().
00465 { 00466 m_RoadSegments = segments; 00467 }
| void Lane::setOutputDetector | ( | OutputDetector * | out | ) |
Sets the output detector for the direction.
- Parameters:
-
out The output detector
Definition at line 455 of file Lane.cpp.
References m_pOutputDetector.
Referenced by Direction::createLanes().
00456 { 00457 m_pOutputDetector = out; 00458 }
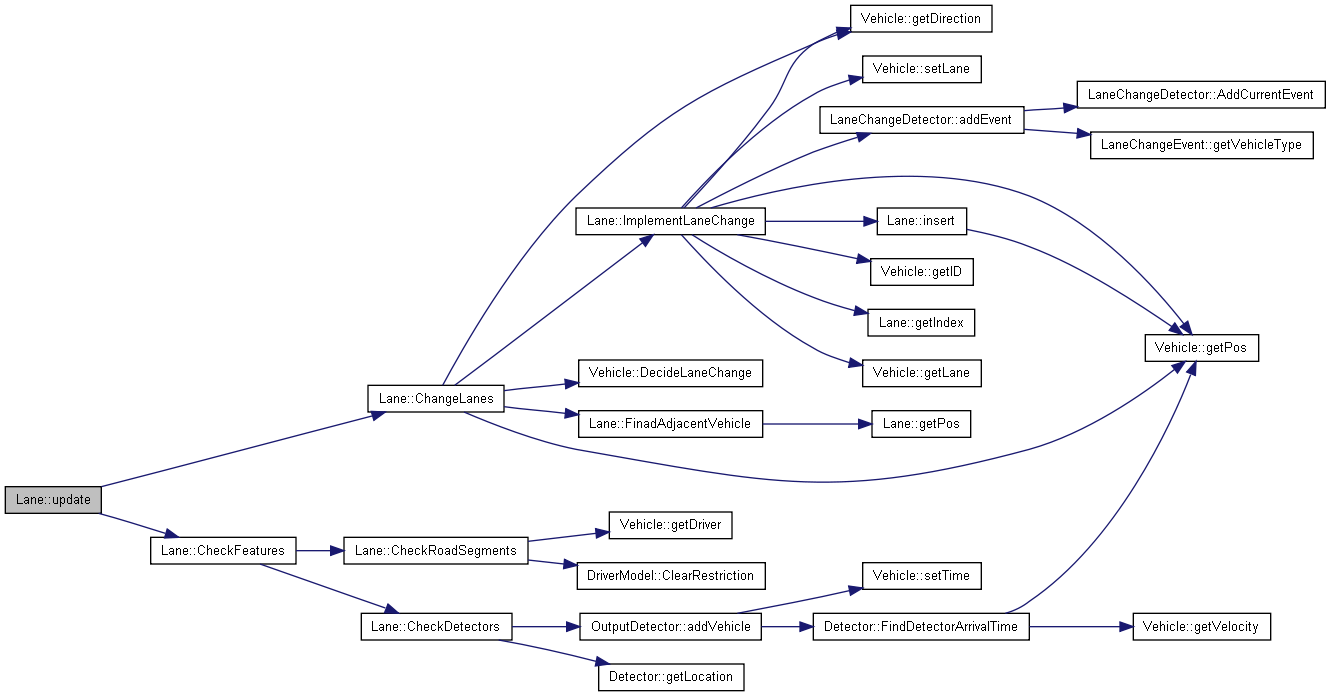
| bool Lane::update | ( | const double | step, | |
| const double | curTime | |||
| ) |
Updates the positions of all Vehicles in the Lane.
This function is called for each iteration of the simulation, and handles the updating of the positions of Vehicles, and the removal of Vehicles which are no longer on the Road. If there are any Vehicles on the Road, the Vehicle at the head of the Lane is updated with respect to the clear Road ahead of it. Following this, all Vehicles following the Vehicle at the head of the Road are updated with respect to the preceding Vehicle. These Vehicles are also checked to see if it is time to determine if changing to another Lane would be advantageous. After all Vehicles have been updated, it is checked to see whether the Vehicle at the head of the Lane has yet passed the end of the Road. If it has, it is removed from the Lane and the simulation. Vehicles are also checked to see if they have passed a detector during the update
- Parameters:
-
step The timestep curTime The current simulation time
- Returns:
- Whether the lane is empty or not
- See also:
- ChangeLanes()
Definition at line 90 of file Lane.cpp.
References ChangeLanes(), CheckFeatures(), m_AllowLaneChanging, m_CurTime, m_NoVeh, m_PrevVehiclePosition, m_pVehicles, m_RoadLength, and MIN_SPACE_FOR_NEXT_VEHICLE.
00091 { 00092 m_CurTime = curTime; 00093 bool laneEmpty = true; 00094 00095 if(m_pVehicles.size() > 0) 00096 { 00097 // Update the head of the lane to drive towards the end of the road 00098 double previousPos = m_pVehicles.front()->getPos(); 00099 m_pVehicles.front()->update(step); 00100 double currentPos = m_pVehicles.front()->getPos(); 00101 CheckFeatures(curTime, previousPos, currentPos, m_pVehicles.front()); 00102 00103 // Update each vehicle based on the properties of the preceding vehicle 00104 for(int i = 1; i < m_pVehicles.size(); i++) 00105 { 00106 previousPos = m_pVehicles[i]->getPos(); 00107 m_pVehicles[i]->update(step, m_pVehicles[i-1]); 00108 currentPos = m_pVehicles[i]->getPos(); 00109 00110 bool bChangedLane = false; 00111 if(m_AllowLaneChanging) // Check if overtaking is allowed 00112 { 00113 bool bChangeStatus = m_pVehicles.at(i)->getChangeStatus(); // Ready to change lane? 00114 if(bChangeStatus) 00115 { 00116 Lane* pNewLane = ChangeLanes(m_pVehicles.at(i)); // return new lane if it's changed 00117 bChangedLane = pNewLane == NULL ? false : true; // Has it changed? 00118 if(bChangedLane) 00119 { 00120 // get the new lane to check the vehicle for a detector/segment for this time step 00121 pNewLane->CheckFeatures(curTime, previousPos, currentPos, m_pVehicles.at(i)); 00122 m_pVehicles.at(i)->setChangeStatus(false); // Reset status 00123 m_pVehicles.erase(m_pVehicles.begin()+i); // Remove from this lane 00124 } 00125 } 00126 } 00127 if(!bChangedLane) 00128 CheckFeatures(curTime, previousPos, currentPos, m_pVehicles.at(i)); 00129 00130 } 00131 // update position of last vehicle in lane 00132 // so more vehicles can get on the road 00133 m_PrevVehiclePosition = m_pVehicles.back()->getPos(); 00134 00135 //Remove any vehicles that are no longer on the road 00136 if(m_pVehicles.at(0)->getPos() > m_RoadLength + MIN_SPACE_FOR_NEXT_VEHICLE) 00137 { 00138 delete m_pVehicles.front(); 00139 m_pVehicles.erase(m_pVehicles.begin()); 00140 m_NoVeh--; 00141 } 00142 laneEmpty = false;; 00143 } 00144 return laneEmpty; 00145 }
| int Lane::getIndex | ( | ) |
Gets the index of the lane.
- Returns:
- The index of the lane
Definition at line 268 of file Lane.cpp.
References m_iLane.
Referenced by ImplementLaneChange().
00269 { 00270 return m_iLane; 00271 }
| double Lane::getLastPos | ( | ) |
Gets the position of the last vehicle in the lane.
- Returns:
- The position of the last vehicle in the lane
Definition at line 259 of file Lane.cpp.
References m_PrevVehiclePosition.
00260 { 00261 return m_PrevVehiclePosition; 00262 }
| int Lane::getNoVeh | ( | ) |
Gets the number of vehicles in the lane.
- Returns:
- The number of vehicles in the lane
Definition at line 250 of file Lane.cpp.
References m_pVehicles.
00251 { 00252 return m_pVehicles.size(); 00253 }
| double Lane::getLength | ( | ) |
Gets the length of the Lane.
- Returns:
- The length of the Lane
Definition at line 205 of file Lane.cpp.
References m_RoadLength.
00206 { 00207 return m_RoadLength; 00208 }
| void Lane::insert | ( | int | i, | |
| Vehicle * | pVeh | |||
| ) |
Inserts a Vehicle into the Lane.
This function inserts a given Vehicle into a particular position in a Lane
Definition at line 436 of file Lane.cpp.
References Vehicle::getPos(), m_NoVeh, m_PrevVehiclePosition, and m_pVehicles.
Referenced by ImplementLaneChange().
00437 { 00438 if(i == m_pVehicles.size()) // insert at end 00439 { 00440 m_pVehicles.push_back(pVeh); 00441 m_PrevVehiclePosition = pVeh->getPos(); 00442 } 00443 else if(i <= 0) // insert at front 00444 m_pVehicles.insert(m_pVehicles.begin(), pVeh); 00445 else // insert between front & back, i.e. lane change 00446 m_pVehicles.insert(m_pVehicles.begin()+i, pVeh); 00447 00448 m_NoVeh++; 00449 }

| void Lane::setRightLane | ( | Lane * | right | ) |
Sets a pointer to the Lane to the right of the current Lane The Lane index is in global coords:
- For DriveOnRight the lanes are numbered from bottom to top 0.
..n
- For left driving the lanes are numbered from top to bottom 0...n
- Parameters:
-
right The Lane to point to
Definition at line 241 of file Lane.cpp.
References m_RightLane.
00242 { 00243 m_RightLane = right; 00244 }
| void Lane::setLeftLane | ( | Lane * | left | ) |
Sets a pointer to the Lane to the left of the current Lane The Lane index is in global coords:
- For DriveOnRight the lanes are numbered from bottom to top 0.
..n
- For left driving the lanes are numbered from top to bottom 0...n
- Parameters:
-
left The Lane to point to
Definition at line 229 of file Lane.cpp.
References m_LeftLane.
00230 { 00231 m_LeftLane = left; 00232 }
| std::vector< Vehicle * > Lane::getPos | ( | ) |
Gets all the Vehicles currently in the Lane.
This function returns the vector which contains pointers to all Vehicles which are currently in the Lane
- Returns:
- All of the Vehicles in the Lane
Definition at line 217 of file Lane.cpp.
References m_pVehicles.
Referenced by FinadAdjacentVehicle().
00218 { 00219 return m_pVehicles; 00220 }
| Vehicle * Lane::FinadAdjacentVehicle | ( | Lane * | AdjacentLane, | |
| double | location, | |||
| bool | front, | |||
| int * | iAdjacentLane = NULL | |||
| ) | [private] |
Finds a vehicle in the adjacent lane.
- Parameters:
-
AdjacentLane The lane at which we are looking location The location of the vehicle wishing to change front Whether or not we are looking for the vehicle in front of the current vehicle's position iAdjacentLane The index to switch into in the adjacent lane
- Returns:
- The vehicle desired
Definition at line 400 of file Lane.cpp.
References getPos().
Referenced by ChangeLanes().
00401 { 00402 std::vector<Vehicle*> AdjacentLaneVeh = AdjacentLane->getPos(); 00403 00404 if(AdjacentLaneVeh.size() == 0) 00405 return NULL; 00406 00407 // searches from back of nextLane up to the vehicle in front 00408 int i = AdjacentLaneVeh.size() - 1; 00409 00410 while(i >= 0 && AdjacentLaneVeh.at(i)->getPos() < location) 00411 i--; 00412 00413 if(iAdjacentLane != NULL) // i points to the vehicle in front of us in the other lane 00414 *iAdjacentLane = i+1; // place the position in iAdjacentLane 00415 00416 //We need to check for bounds here, since we're returning a Vehicle, not an index 00417 00418 if(front && i >= 0) 00419 return AdjacentLaneVeh.at(i); 00420 else if(front && i < 0) 00421 return NULL; 00422 else if(!front && i == AdjacentLaneVeh.size() - 1) 00423 return NULL; 00424 else 00425 return AdjacentLaneVeh.at(i+1); 00426 }

Changes a Vehicle's Lane if advantageous and possible.
- Parameters:
-
pVeh The vehicle changing lanes
- Returns:
- Whether or not the vehicle has changed lane
Definition at line 285 of file Lane.cpp.
References Vehicle::DecideLaneChange(), FinadAdjacentVehicle(), Vehicle::getDirection(), Vehicle::getPos(), ImplementLaneChange(), m_LeftLane, and m_RightLane.
Referenced by update().
00286 { 00287 // since if it's a single lane you cannot change so let's not even bother 00288 if(m_RightLane == NULL && m_LeftLane == NULL) 00289 return false; 00290 00291 bool DirPos = pVeh->getDirection(); 00292 Vehicle* LeftFrontVehicle = NULL; Vehicle* LeftBackVehicle = NULL; 00293 Vehicle* RightFrontVehicle = NULL; Vehicle* RightBackVehicle = NULL; 00294 int iLeftLane = 0; int iRightLane = 0; 00295 bool LeftLaneExists = m_LeftLane != NULL ? true : false; 00296 bool RightLaneExists = m_RightLane != NULL ? true : false; 00297 00298 if(LeftLaneExists) 00299 { 00300 LeftFrontVehicle = FinadAdjacentVehicle(m_LeftLane, pVeh->getPos(), true, &iLeftLane); 00301 LeftBackVehicle = FinadAdjacentVehicle(m_LeftLane, pVeh->getPos(), false); 00302 } 00303 00304 if(RightLaneExists) 00305 { 00306 RightFrontVehicle = FinadAdjacentVehicle(m_RightLane, pVeh->getPos(), true, &iRightLane); 00307 RightBackVehicle = FinadAdjacentVehicle(m_RightLane, pVeh->getPos(), false); 00308 } 00309 int LaneChangeID = 0; 00310 if(DirPos) // in DirPos 00311 LaneChangeID = pVeh->DecideLaneChange( LeftFrontVehicle, LeftBackVehicle, 00312 RightFrontVehicle, RightBackVehicle, 00313 LeftLaneExists, RightLaneExists); 00314 else // in DirNeg so swap vehicles - see comment in Vehicle::DecideLaneChange() 00315 LaneChangeID = pVeh->DecideLaneChange( RightFrontVehicle, RightBackVehicle, 00316 LeftFrontVehicle, LeftBackVehicle, 00317 RightLaneExists, LeftLaneExists); 00318 00319 if(LaneChangeID == 0) 00320 return NULL; 00321 else 00322 { 00323 Lane* pNewLane = ImplementLaneChange(pVeh, LaneChangeID, iLeftLane, iRightLane); 00324 return pNewLane; 00325 } 00326 }
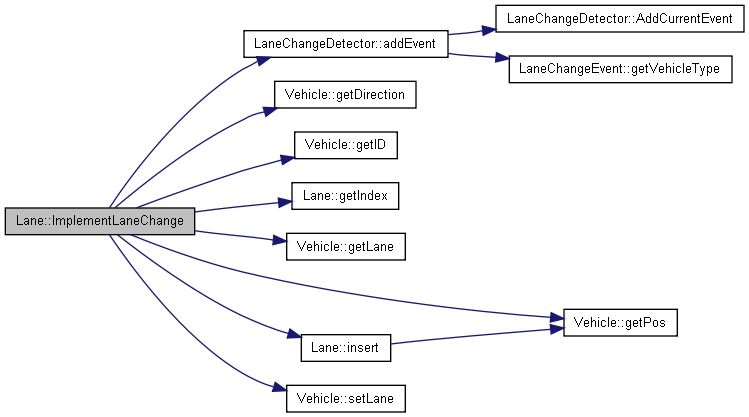
| Lane * Lane::ImplementLaneChange | ( | Vehicle * | pVeh, | |
| int | LaneChangeID, | |||
| int | iVehLeftLane, | |||
| int | iVehRightLane | |||
| ) | [private] |
Changes a vehicle to another lane.
- Parameters:
-
pVeh The vehicle changing lane LaneChangeID The lane to change to iVehLeftLane The index of the vehicle if moving to the left lane iVehRightLane The index of the vehicle if moving to the right lane
Definition at line 339 of file Lane.cpp.
References LaneChangeDetector::addEvent(), Vehicle::getDirection(), Vehicle::getID(), getIndex(), Vehicle::getLane(), Vehicle::getPos(), insert(), m_bTrackLaneChanges, m_CurTime, m_LeftLane, m_pLaneChangeDetector, m_RightLane, m_RoadLength, and Vehicle::setLane().
Referenced by ChangeLanes().
00340 { 00341 Lane* VehiclesLeftLane; Lane* VehiclesRightLane; Lane* LaneToChange; 00342 00343 int fromLane = pVeh->getLane(); // for lane change detector 00344 double position = pVeh->getPos(); 00345 bool DirPos = pVeh->getDirection(); 00346 bool changeLeft = true; 00347 00348 if(DirPos) 00349 { 00350 VehiclesLeftLane = m_LeftLane; VehiclesRightLane = m_RightLane; 00351 } 00352 else 00353 { 00354 VehiclesLeftLane = m_RightLane; VehiclesRightLane = m_LeftLane; 00355 00356 int temp = iVehLeftLane; // Swapping vehicle index in new Lane 00357 iVehLeftLane = iVehRightLane; 00358 iVehRightLane = temp; 00359 00360 position = m_RoadLength - position; 00361 } 00362 if(LaneChangeID == 1) 00363 { 00364 // change to the vehicle's left lane 00365 pVeh->setLane(VehiclesLeftLane->getIndex()+1); // vehicle lane numbers are 1-based 00366 VehiclesLeftLane->insert(iVehLeftLane, pVeh); 00367 LaneToChange = VehiclesLeftLane; 00368 } 00369 else 00370 { 00371 changeLeft = false; 00372 // change to vehicle's right lane 00373 pVeh->setLane(VehiclesRightLane->getIndex()+1); // vehicle lane numbers are 1-based 00374 VehiclesRightLane->insert(iVehRightLane, pVeh); 00375 LaneToChange = VehiclesRightLane; 00376 } 00377 00378 if(m_bTrackLaneChanges) // If we are tracking changes, add this event 00379 { 00380 int toLane = (LaneToChange->getIndex() + 1); 00381 LaneChangeEvent* lce = new LaneChangeEvent(position, fromLane, toLane, pVeh->getID(), changeLeft, DirPos, m_CurTime); 00382 m_pLaneChangeDetector->addEvent(lce); 00383 } 00384 00385 return LaneToChange; 00386 }
| void Lane::CheckDetectors | ( | const double | curTime, | |
| double | prevPosition, | |||
| double | curPosition, | |||
| Vehicle * | pVeh | |||
| ) | [private] |
Adds a vehicle to the detectors list of vehicles for that step.
- Parameters:
-
curTime The current simulation time prevPosition The vehicle's previous position curPosition The vehicle's current position pVeh The vehicle
Definition at line 179 of file Lane.cpp.
References OutputDetector::addVehicle(), Detector::getLocation(), m_pOutputDetector, and m_vDetectors.
Referenced by CheckFeatures().
00180 { 00181 // if the vehicle has moved past it in the last time step 00182 // add the vehicle to the detector 00183 00185 int DetectorLocation = m_pOutputDetector->getLocation(); 00186 if(prevPosition <= DetectorLocation && curPosition >= DetectorLocation) 00187 m_pOutputDetector->addVehicle(pVeh, curTime); 00188 00190 00191 for(int i = 0; i < m_vDetectors.size(); i++) 00192 { 00193 DetectorLocation = m_vDetectors.at(i)->getLocation(); 00194 if(prevPosition <= DetectorLocation && curPosition >= DetectorLocation) 00195 m_vDetectors.at(i)->addVehicle(pVeh, curTime); 00196 } 00197 }

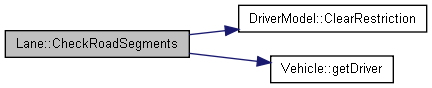
| void Lane::CheckRoadSegments | ( | double | prevPosition, | |
| double | curPosition, | |||
| Vehicle * | pVeh | |||
| ) | [private] |
Checks whether a vehicle has entered or exited any road segments.
- Parameters:
-
prevPosition The position of the vehicle before the update curPosition The position of the vehicle after the update pVeh The vehicle involved
Definition at line 482 of file Lane.cpp.
References DriverModel::ClearRestriction(), Vehicle::getDriver(), and m_RoadSegments.
Referenced by CheckFeatures().
00483 { 00484 bool entered = false; 00485 bool exited = false; 00486 int nSegments = m_RoadSegments.size(); 00487 00488 for(int i = 0; i < nSegments; i++) // for each road segment 00489 { 00490 int start = m_RoadSegments.at(i)->getBeginning(); // its start and end 00491 int end = m_RoadSegments.at(i)->getEnd(); 00492 00493 if(prevPosition <= start && curPosition >= start) // if we have entered the segment 00494 { 00495 m_RoadSegments.at(i)->addVehicle(pVeh); 00496 entered = true; 00497 } 00498 else if(prevPosition < end && curPosition >= end) // else if we have exited the segment 00499 { 00500 m_RoadSegments.at(i)->removeVehicle(pVeh); 00501 exited = true; 00502 } 00503 } 00504 00505 if(exited && !entered) // if we have exited a segment, but not entered a subsequent one 00506 { 00507 for(int j = 0; j < nSegments; j++) 00508 { 00509 int start = m_RoadSegments.at(j)->getBeginning(); 00510 int end = m_RoadSegments.at(j)->getEnd(); 00511 00512 if(curPosition >= start && curPosition < end) 00513 { 00514 m_RoadSegments.at(j)->addVehicle(pVeh); 00515 entered = true; 00516 break; 00517 } 00518 } 00519 if(!entered) 00520 pVeh->getDriver()->ClearRestriction(); 00521 } 00522 }
Member Data Documentation
std::vector<Vehicle*> Lane::m_pVehicles [private] |
std::vector<Detector*> Lane::m_vDetectors [private] |
int Lane::m_Dir [private] |
int Lane::m_iLane [private] |
double Lane::m_Flow [private] |
double Lane::m_RoadLength [private] |
Definition at line 64 of file Lane.h.
Referenced by getLength(), ImplementLaneChange(), Lane(), and update().
int Lane::m_NoVeh [private] |
double Lane::m_PrevVehiclePosition [private] |
bool Lane::m_AllowLaneChanging [private] |
bool Lane::m_DirPos [private] |
double Lane::m_CurTime [private] |
bool Lane::m_bTrackLaneChanges [private] |
std::vector<RoadSegment*> Lane::m_RoadSegments [private] |
Definition at line 72 of file Lane.h.
Referenced by CheckRoadSegments(), clear(), and setRoadSegments().
Lane* Lane::m_LeftLane [private] |
Definition at line 74 of file Lane.h.
Referenced by ChangeLanes(), ImplementLaneChange(), Lane(), and setLeftLane().
Lane* Lane::m_RightLane [private] |
Definition at line 75 of file Lane.h.
Referenced by ChangeLanes(), ImplementLaneChange(), Lane(), and setRightLane().
OutputDetector* Lane::m_pOutputDetector [private] |
LaneChangeDetector* Lane::m_pLaneChangeDetector [private] |
double Lane::MIN_SPACE_FOR_NEXT_VEHICLE [private] |
The documentation for this class was generated from the following files:
