CEvolveTrafficView Class Reference
A class for user interaction and drawing functions. More...
#include <EvolveTrafficView.h>

Public Member Functions | |
| CEvolveTrafficDoc * | GetDocument () |
| virtual void | OnDraw (CDC *pDC) |
| virtual BOOL | PreCreateWindow (CREATESTRUCT &cs) |
| virtual void | OnPrepareDC (CDC *pDC, CPrintInfo *pInfo=NULL) |
| void | UpdateProgressBar () |
| void | doLoop (int curTime) |
| void | setMaxTimeWarp () |
| virtual | ~CEvolveTrafficView () |
Protected Member Functions | |
| CEvolveTrafficView () | |
| virtual void | OnInitialUpdate () |
| virtual BOOL | OnPreparePrinting (CPrintInfo *pInfo) |
| virtual void | OnBeginPrinting (CDC *pDC, CPrintInfo *pInfo) |
| virtual void | OnEndPrinting (CDC *pDC, CPrintInfo *pInfo) |
| afx_msg void | OnConfigSim () |
| afx_msg void | OnRunVisible () |
| afx_msg void | OnSize (UINT nType, int cx, int cy) |
| afx_msg void | OnConfigTraf () |
| afx_msg void | OnToolsPrefs () |
| afx_msg void | OnToolsPause () |
| afx_msg void | OnToolsZoomin () |
| afx_msg void | OnToolsZoomout () |
| afx_msg void | OnToolsSpeedup () |
| afx_msg void | OnToolsSlowdown () |
| afx_msg void | OnKeyDown (UINT nChar, UINT nRepCnt, UINT nFlags) |
| afx_msg void | OnRunInvisible () |
| afx_msg void | OnConfigFeatures () |
| afx_msg void | OnConfigMetrics () |
| afx_msg void | OnUpdateToolsPause (CCmdUI *pCmdUI) |
| afx_msg void | OnUpdateToolsSpeedup (CCmdUI *pCmdUI) |
| afx_msg void | OnUpdateToolsSlowdown (CCmdUI *pCmdUI) |
| afx_msg void | OnToolsStop () |
| afx_msg void | OnUpdateToolsStop (CCmdUI *pCmdUI) |
| afx_msg void | OnLButtonDown (UINT nFlags, CPoint point) |
| afx_msg void | OnFileSaveImage () |
Private Member Functions | |
| Vehicle * | FindVehicle (int iLane, int location) |
| BOOL | WriteWindowToDIB (LPTSTR szFile, CWnd *pWnd) |
| void | SetZoomScale (double newScale) |
| void | ValidateTimeWarp () |
| void | doSimStart () |
| int | Round (double val) |
| void | doSimFinished (bool bCompleted) |
| void | UpdateDrawRegion () |
| void | SettingUpdateRedraw () |
| void | initRoad () |
| void | DrawRoad (CMemDC *pDC) |
| void | DrawRuler (CMemDC *pDC) |
| void | DrawTimer (CMemDC *pDC) |
| void | DrawVehicle (CMemDC *pDC, Vehicle *veh) |
| void | DrawVehicleAt (CMemDC *pDC, WORD VEH_ID, CRect VehRect) |
| void | DrawDetectors (CMemDC *pDC) |
| void | DrawLaneChangeDetectors (CMemDC *pDC, bool DirPos) |
| void | DrawLegend (CMemDC *pDC) |
| void | DrawLegendElement (CMemDC *pDC, int LineLength, int LineToText, int xpos, int ypos, CString str, COLORREF COL) |
| void | DrawSingleSegment (CMemDC *pDC, COLORREF COL, WORD HATCH, WORD FeatType, int val, CRect rect, int yTextOffset) |
| void | DrawRoadSegments (CMemDC *pDC) |
| void | DrawSingleDetector (CMemDC *pDC, COLORREF COL, int Loc, bool DirPos) |
| void | DrawLegendSegment (CMemDC *pDC, COLORREF COL, WORD HATCH, WORD FeatType, CString str, int value, int LineToText, int xpos, int ypos) |
| void | DrawLegendVehicle (CMemDC *pDC, WORD VehType, CString str, int LineToText, int xpos, int ypos) |
Private Attributes | |
| bool | m_bShowLegend |
| bool | m_bShowVelocity |
| int | m_BtmEdge |
| int | m_TopEdge |
| int | m_nLanesOnBtm |
| int | m_nLanesOnTop |
| bool | m_DriveOnRight |
| double | m_ExaggerateWidths |
| CSize | m_DrawArea |
| int | m_LastPercentComplete |
| double | m_MaxTimeWarp |
| int | m_SimTimeStep |
| int | m_PauseTime |
| int | m_StartRealTime |
| int | m_CurentRealTime |
| double | m_CurentSimTime |
| BOOL | m_bPause |
| int | m_TimerSpeed |
| int | m_PercentComplete |
| CRect | m_ClientRect |
| int | m_YCoordTop |
| RECT | m_RoadRect |
| bool | m_bInSimulation |
| double | m_Scale |
| double | m_TimeWarp |
| double | m_VehicleLengthScale |
| double | m_VehicleWidth |
| double | m_TickLength |
| int | m_TickStep |
| double | m_LaneWidth |
| double | m_Border_Top |
| double | m_Border_Btm |
| double | m_Border_Lhs |
| double | m_Border_Rhs |
| int | m_NoDirections |
| int | m_NoLanes |
| int | m_NoLanesDirPos |
| int | m_NoLanesDirNeg |
| int | m_RoadLength |
| int | m_NoTicks |
| int | m_RoadWidth |
| M2D | m_VehiclePositions |
| CEvolveTrafficDoc * | m_pDoc |
| CProgressBar * | m_pProgBar |
| CMessageTip | m_DataTip |
| double | MIN_VIEW_SCALE |
| double | DATATIP_DELAY |
| COLORREF | CLR_BACKGRND |
| COLORREF | CLR_DET_COMPOSITION |
| COLORREF | CLR_DET_FLOWDENSITY |
| COLORREF | CLR_DET_HEADWAY |
| COLORREF | CLR_DET_OUTPUT |
| COLORREF | CLR_FEAT_GRADIENT |
| COLORREF | CLR_FEAT_SPEEDLIMIT |
| COLORREF | CLR_LEGEND_TEXT |
| COLORREF | CLR_ROAD_LINES |
| COLORREF | CLR_ROAD_SURFACE |
| COLORREF | CLR_RULER_LINES |
| COLORREF | CLR_RULER_TEXT |
| COLORREF | VEH_COLOR_CAR |
| COLORREF | VEH_COLOR_SMALLTRUCK |
| COLORREF | VEH_COLOR_LARGETRUCK |
| COLORREF | VEH_COLOR_CRANE |
| COLORREF | VEH_COLOR_LOWLOADER |
Detailed Description
A class for user interaction and drawing functions.Definition at line 18 of file EvolveTrafficView.h.
Constructor & Destructor Documentation
| CEvolveTrafficView::CEvolveTrafficView | ( | ) | [protected] |
Definition at line 67 of file EvolveTrafficView.cpp.
References CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_BACKGRND, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_DET_COMPOSITION, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_DET_FLOWDENSITY, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_DET_HEADWAY, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_DET_OUTPUT, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_FEAT_GRADIENT, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_FEAT_SPEEDLIMIT, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_LEGEND_TEXT, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_ROAD_LINES, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_ROAD_SURFACE, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_RULER_LINES, CConfigData::View_Config::View_Colours::Col_DrawElements::CLR_RULER_TEXT, CConfigData::View_Config::Colours, CConfigData::View_Config::DATATIP_DELAY, DRAW_FRAMES_PER_SEC, CConfigData::View_Config::View_Colours::DrawElements, CConfigData::View_Config::MIN_VIEW_SCALE, CConfigData::View_Config::View_Colours::Col_Vehicles::VEH_COLOR_CAR, CConfigData::View_Config::View_Colours::Col_Vehicles::VEH_COLOR_CRANE, CConfigData::View_Config::View_Colours::Col_Vehicles::VEH_COLOR_LARGETRUCK, CConfigData::View_Config::View_Colours::Col_Vehicles::VEH_COLOR_LOWLOADER, CConfigData::View_Config::View_Colours::Col_Vehicles::VEH_COLOR_SMALLTRUCK, CConfigData::View_Config::View_Colours::Vehicles, and CConfigData::View.
00068 { 00069 // Configuration Settings 00070 MIN_VIEW_SCALE = g_ConfigData.View.MIN_VIEW_SCALE; 00071 DATATIP_DELAY = g_ConfigData.View.DATATIP_DELAY; 00072 00073 CLR_BACKGRND = g_ConfigData.View.Colours.DrawElements.CLR_BACKGRND; 00074 CLR_DET_COMPOSITION = g_ConfigData.View.Colours.DrawElements.CLR_DET_COMPOSITION; 00075 CLR_DET_FLOWDENSITY = g_ConfigData.View.Colours.DrawElements.CLR_DET_FLOWDENSITY; 00076 CLR_DET_HEADWAY = g_ConfigData.View.Colours.DrawElements.CLR_DET_HEADWAY; 00077 CLR_DET_OUTPUT = g_ConfigData.View.Colours.DrawElements.CLR_DET_OUTPUT; 00078 CLR_FEAT_GRADIENT = g_ConfigData.View.Colours.DrawElements.CLR_FEAT_GRADIENT; 00079 CLR_FEAT_SPEEDLIMIT = g_ConfigData.View.Colours.DrawElements.CLR_FEAT_SPEEDLIMIT; 00080 CLR_LEGEND_TEXT = g_ConfigData.View.Colours.DrawElements.CLR_LEGEND_TEXT; 00081 CLR_ROAD_LINES = g_ConfigData.View.Colours.DrawElements.CLR_ROAD_LINES; 00082 CLR_ROAD_SURFACE = g_ConfigData.View.Colours.DrawElements.CLR_ROAD_SURFACE; 00083 CLR_RULER_LINES = g_ConfigData.View.Colours.DrawElements.CLR_RULER_LINES; 00084 CLR_RULER_TEXT = g_ConfigData.View.Colours.DrawElements.CLR_RULER_TEXT; 00085 00086 VEH_COLOR_CAR = g_ConfigData.View.Colours.Vehicles.VEH_COLOR_CAR; 00087 VEH_COLOR_SMALLTRUCK = g_ConfigData.View.Colours.Vehicles.VEH_COLOR_SMALLTRUCK; 00088 VEH_COLOR_LARGETRUCK = g_ConfigData.View.Colours.Vehicles.VEH_COLOR_LARGETRUCK; 00089 VEH_COLOR_CRANE = g_ConfigData.View.Colours.Vehicles.VEH_COLOR_CRANE; 00090 VEH_COLOR_LOWLOADER = g_ConfigData.View.Colours.Vehicles.VEH_COLOR_LOWLOADER; 00091 00092 // Initial view scale 00093 m_Scale = 1.0; 00094 m_ExaggerateWidths = 10.0; 00095 00096 m_Border_Top = 20; 00097 m_Border_Btm = 40; 00098 m_Border_Lhs = 20; 00099 m_Border_Rhs = 100; 00100 m_TickStep = 500; 00101 m_VehicleLengthScale = 2.0; // so they look ok - results in overlaps?? 00102 m_bShowVelocity = true; 00103 m_bShowLegend = true; 00104 m_TickLength = 1.0 * m_ExaggerateWidths; 00105 m_LaneWidth = 4.0 * m_ExaggerateWidths; 00106 m_VehicleWidth = 3.0 * m_ExaggerateWidths; // less than lane width! 00107 00108 m_bInSimulation = false; // has a simulation begun 00109 m_bPause = false; // is the simulation to progress one step 00110 m_TimeWarp = 1; // multiplier of real time that the simulation runs 00111 // the timer speed is constant since the refresh rate is constant 00112 m_TimerSpeed = Round(1000/DRAW_FRAMES_PER_SEC); // in int ms 00113 m_CurentRealTime = 0; // actual time since simulation started 00114 m_CurentSimTime = 0; // sim time since sim started 00115 m_PauseTime = 0; // the time the sim was paused at 00116 m_MaxTimeWarp = 1000; // a high number - will be reduced as sim progresses 00117 00118 m_LastPercentComplete = 0; 00119 m_PercentComplete = 0; 00120 00121 m_YCoordTop = 0; // legacy - need to remove 00122 }
| CEvolveTrafficView::~CEvolveTrafficView | ( | ) | [virtual] |
Member Function Documentation
| CEvolveTrafficDoc * CEvolveTrafficView::GetDocument | ( | ) | [inline] |
Definition at line 193 of file EvolveTrafficView.h.
Referenced by OnInitialUpdate().
00194 { return (CEvolveTrafficDoc*)m_pDocument; }
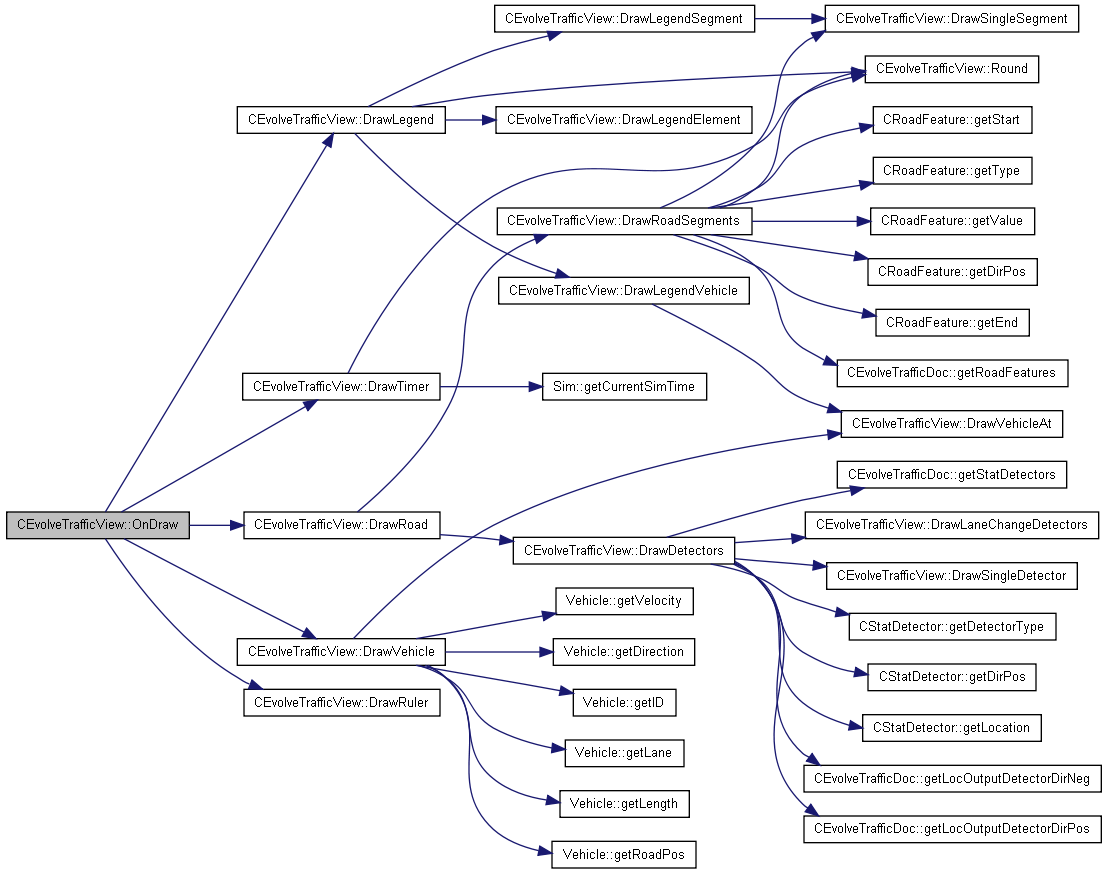
| void CEvolveTrafficView::OnDraw | ( | CDC * | pDC | ) | [virtual] |
Definition at line 287 of file EvolveTrafficView.cpp.
References DrawLegend(), DrawRoad(), DrawRuler(), DrawTimer(), DrawVehicle(), m_bInSimulation, m_bShowLegend, and m_VehiclePositions.
00288 { 00289 CMemDC pDC(dc); 00290 00291 DrawRoad(pDC); 00292 DrawRuler(pDC); 00293 00294 if(m_bShowLegend) 00295 DrawLegend(pDC); 00296 00297 if(m_bInSimulation) // we're in a simulation 00298 { 00299 // draw the vehicles where they are 00300 for (int i = 0; i < m_VehiclePositions.size(); i++) // Total number of lanes 00301 { 00302 for (int j = 0; j < m_VehiclePositions[i].size(); j++) // No vehicles in each lane 00303 DrawVehicle(pDC, m_VehiclePositions[i][j]); 00304 } 00305 } 00306 00307 DrawTimer(pDC); // always draw & last so it's on top 00308 00309 }
| BOOL CEvolveTrafficView::PreCreateWindow | ( | CREATESTRUCT & | cs | ) | [virtual] |
Definition at line 129 of file EvolveTrafficView.cpp.
00130 { 00131 // TODO: Modify the Window class or styles here by modifying 00132 // the CREATESTRUCT cs 00133 00134 return CScrollView::PreCreateWindow(cs); 00135 }
| void CEvolveTrafficView::OnPrepareDC | ( | CDC * | pDC, | |
| CPrintInfo * | pInfo = NULL | |||
| ) | [virtual] |
Definition at line 159 of file EvolveTrafficView.cpp.
References m_Border_Lhs, m_ClientRect, m_DrawArea, and m_Scale.
Referenced by OnLButtonDown().
00160 { 00161 CScrollView::OnPrepareDC(pDC, pInfo); 00162 00163 pDC->SetMapMode(MM_ANISOTROPIC); // for scaling 00164 pDC->SetWindowExt(m_DrawArea); // in logical units 00165 00166 int xExtent = m_Scale * m_DrawArea.cx; 00167 int yExtent = m_Scale * m_DrawArea.cy; 00168 pDC->SetViewportExt(xExtent, yExtent); 00169 00170 // keep the road divider in the centre of screen 00171 // by moving the viewport origin 00172 GetClientRect(&m_ClientRect); // the height of the window 00173 CPoint viewOrg; 00174 viewOrg.y = m_ClientRect.Height()/2; // - yExtent/2; 00175 viewOrg.x = m_Border_Lhs*m_Scale; 00176 00177 viewOrg -= GetDeviceScrollPosition(); // so scrolling accounted for 00178 pDC->SetViewportOrg(viewOrg); 00179 }
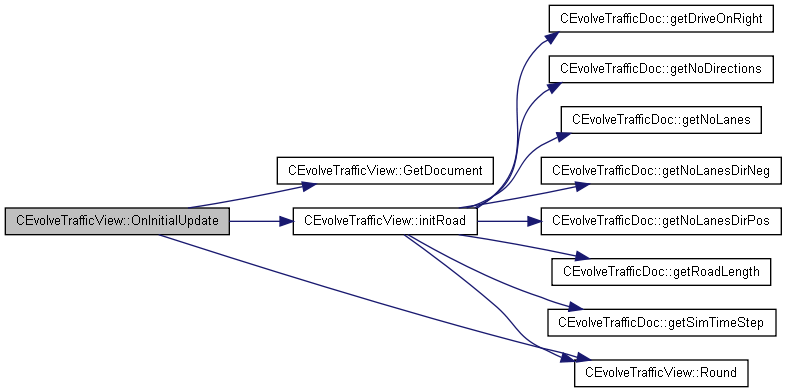
| void CEvolveTrafficView::OnInitialUpdate | ( | ) | [protected, virtual] |
Definition at line 140 of file EvolveTrafficView.cpp.
References DATATIP_DELAY, GetDocument(), initRoad(), m_DataTip, m_DrawArea, m_pDoc, and Round().
00141 { 00142 m_DrawArea.cx = 5000; 00143 m_DrawArea.cy = 100; 00144 00145 CScrollView::OnInitialUpdate(); 00146 00147 m_pDoc = GetDocument(); 00148 ASSERT_VALID(m_pDoc); 00149 00150 initRoad(); 00151 if(m_DataTip.m_hWnd == NULL) 00152 { 00153 m_DataTip.Create(this); 00154 m_DataTip.SetDisplayTime( Round(DATATIP_DELAY*1000) ); 00155 } 00156 00157 }
| BOOL CEvolveTrafficView::OnPreparePrinting | ( | CPrintInfo * | pInfo | ) | [protected, virtual] |
| void CEvolveTrafficView::OnBeginPrinting | ( | CDC * | pDC, | |
| CPrintInfo * | pInfo | |||
| ) | [protected, virtual] |
| void CEvolveTrafficView::OnEndPrinting | ( | CDC * | pDC, | |
| CPrintInfo * | pInfo | |||
| ) | [protected, virtual] |
| void CEvolveTrafficView::UpdateProgressBar | ( | ) |
Definition at line 272 of file EvolveTrafficView.cpp.
References Sim::getPercentComplete(), m_LastPercentComplete, m_pDoc, m_PercentComplete, m_pProgBar, and CEvolveTrafficDoc::m_Sim.
Referenced by doLoop(), and OnRunInvisible().
00273 { 00274 m_PercentComplete = m_pDoc->m_Sim.getPercentComplete(); 00275 00276 if(m_PercentComplete > m_LastPercentComplete) 00277 { 00278 CString str; 00279 str.Format("%d%% complete", m_PercentComplete); 00280 m_pProgBar->SetText(str); 00281 m_pProgBar->StepIt(); 00282 m_LastPercentComplete = m_PercentComplete; 00283 Invalidate(FALSE); // called so that during invisible the bar is still seen 00284 } 00285 }

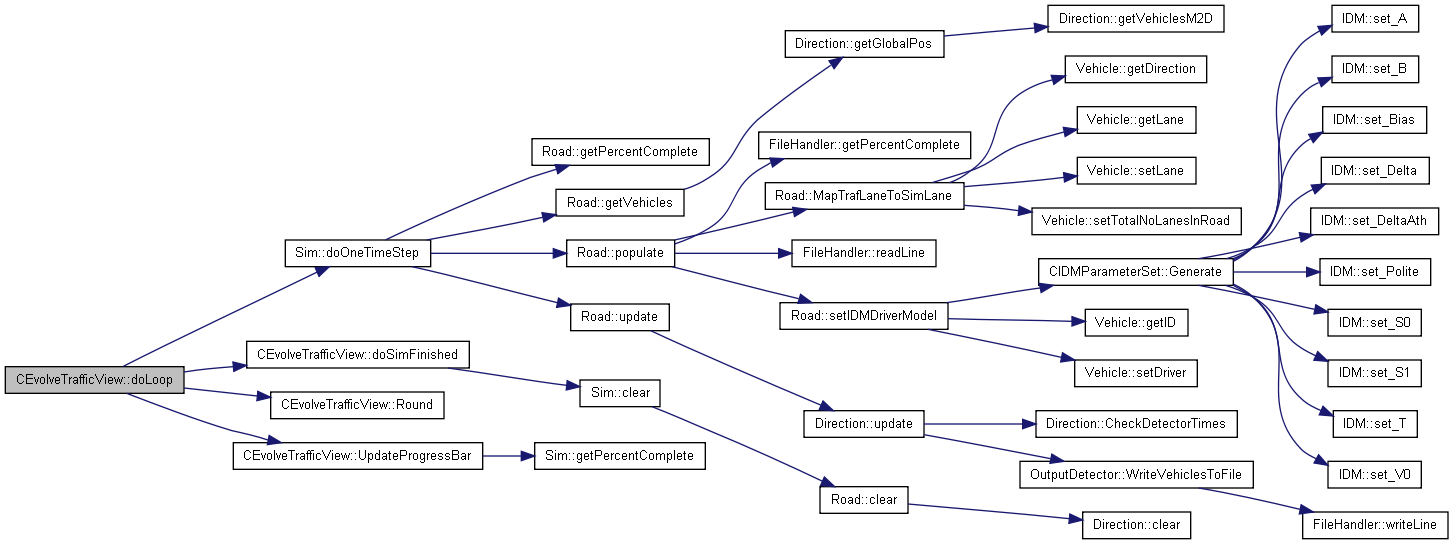
| void CEvolveTrafficView::doLoop | ( | int | curTime | ) |
Definition at line 242 of file EvolveTrafficView.cpp.
References Sim::doOneTimeStep(), doSimFinished(), m_bInSimulation, m_bPause, m_pDoc, CEvolveTrafficDoc::m_Sim, m_SimTimeStep, m_StartRealTime, m_TimerSpeed, m_TimeWarp, m_VehiclePositions, Round(), and UpdateProgressBar().
Referenced by CEvolveTrafficApp::OnIdle().
00243 { 00244 int StepTime = Round( (double)m_SimTimeStep/m_TimeWarp ); 00245 static int TimeNextSimStep = m_StartRealTime + StepTime; 00246 static int TimeNextDraw = m_StartRealTime + m_TimerSpeed; 00247 00248 if(m_bInSimulation && !m_bPause) // simulating & not paused 00249 { 00250 if(curTime > TimeNextSimStep) // ready for next simstep 00251 { 00252 // note m_bInSimulation will become false if it's the end of the simulation 00253 m_VehiclePositions = m_pDoc->m_Sim.doOneTimeStep(&m_bInSimulation); 00254 UpdateProgressBar(); 00255 00256 if(!m_bInSimulation) // we were in a simulation and now we're not - ie it's just finished 00257 doSimFinished(true); // true means completed 00258 00259 while(TimeNextSimStep < curTime) 00260 TimeNextSimStep += StepTime; 00261 } 00262 } 00263 00264 if(curTime > TimeNextDraw) // ready for next frame? 00265 { 00266 InvalidateRect(NULL,FALSE); // draw it 00267 while(TimeNextDraw < curTime) 00268 TimeNextDraw += m_TimerSpeed; 00269 } 00270 }
| void CEvolveTrafficView::setMaxTimeWarp | ( | ) |
Definition at line 428 of file EvolveTrafficView.cpp.
References m_MaxTimeWarp, and m_TimeWarp.
00429 { 00430 m_MaxTimeWarp = m_TimeWarp; 00431 }
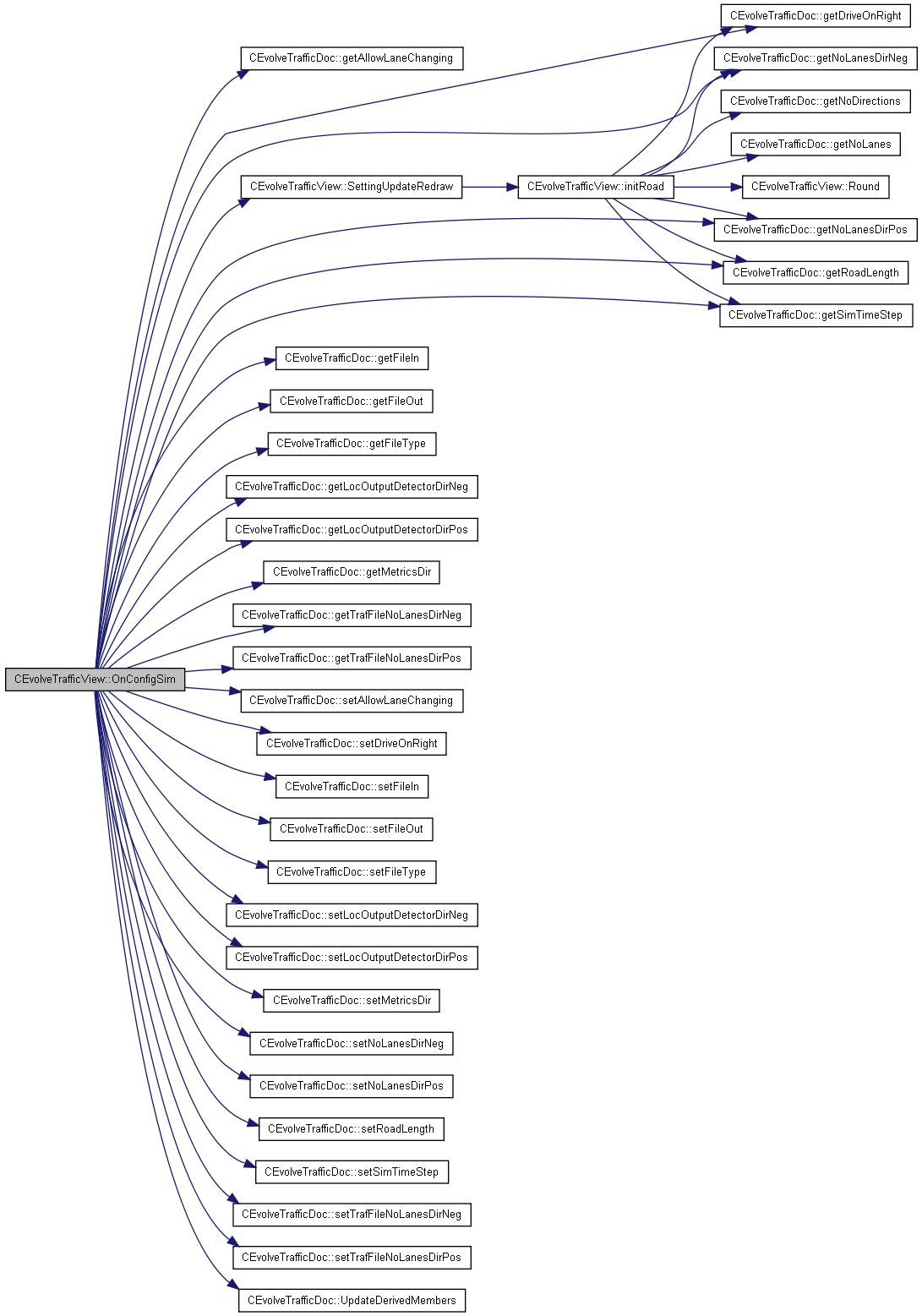
| void CEvolveTrafficView::OnConfigSim | ( | ) | [protected] |
Definition at line 594 of file EvolveTrafficView.cpp.
References CEvolveTrafficDoc::getAllowLaneChanging(), CEvolveTrafficDoc::getDriveOnRight(), CEvolveTrafficDoc::getFileIn(), CEvolveTrafficDoc::getFileOut(), CEvolveTrafficDoc::getFileType(), CEvolveTrafficDoc::getLocOutputDetectorDirNeg(), CEvolveTrafficDoc::getLocOutputDetectorDirPos(), CEvolveTrafficDoc::getMetricsDir(), CEvolveTrafficDoc::getNoLanesDirNeg(), CEvolveTrafficDoc::getNoLanesDirPos(), CEvolveTrafficDoc::getRoadLength(), CEvolveTrafficDoc::getSimTimeStep(), CEvolveTrafficDoc::getTrafFileNoLanesDirNeg(), CEvolveTrafficDoc::getTrafFileNoLanesDirPos(), CSimConfigDlg::m_AllowLaneChanging, CSimConfigDlg::m_DriveOnRight, CSimConfigDlg::m_FileIn, CSimConfigDlg::m_FileOut, CSimConfigDlg::m_FileType, CSimConfigDlg::m_LocOutputDetectorDirNeg, CSimConfigDlg::m_LocOutputDetectorDirPos, CSimConfigDlg::m_MetricsDir, CSimConfigDlg::m_NoLanesDirNeg, CSimConfigDlg::m_NoLanesDirPos, m_pDoc, CSimConfigDlg::m_RoadLength, CSimConfigDlg::m_SimTimeStep, CSimConfigDlg::m_TrafFileNoLanesDirNeg, CSimConfigDlg::m_TrafFileNoLanesDirPos, CEvolveTrafficDoc::setAllowLaneChanging(), CEvolveTrafficDoc::setDriveOnRight(), CEvolveTrafficDoc::setFileIn(), CEvolveTrafficDoc::setFileOut(), CEvolveTrafficDoc::setFileType(), CEvolveTrafficDoc::setLocOutputDetectorDirNeg(), CEvolveTrafficDoc::setLocOutputDetectorDirPos(), CEvolveTrafficDoc::setMetricsDir(), CEvolveTrafficDoc::setNoLanesDirNeg(), CEvolveTrafficDoc::setNoLanesDirPos(), CEvolveTrafficDoc::setRoadLength(), CEvolveTrafficDoc::setSimTimeStep(), SettingUpdateRedraw(), CEvolveTrafficDoc::setTrafFileNoLanesDirNeg(), CEvolveTrafficDoc::setTrafFileNoLanesDirPos(), and CEvolveTrafficDoc::UpdateDerivedMembers().
00595 { 00596 CSimConfigDlg SimDlg; 00597 00598 SimDlg.m_FileIn = m_pDoc->getFileIn(); 00599 SimDlg.m_FileOut = m_pDoc->getFileOut(); 00600 SimDlg.m_MetricsDir = m_pDoc->getMetricsDir(); 00601 SimDlg.m_FileType = m_pDoc->getFileType(); 00602 SimDlg.m_RoadLength = m_pDoc->getRoadLength(); 00603 SimDlg.m_DriveOnRight = m_pDoc->getDriveOnRight(); 00604 SimDlg.m_NoLanesDirPos = m_pDoc->getNoLanesDirPos(); 00605 SimDlg.m_NoLanesDirNeg = m_pDoc->getNoLanesDirNeg(); 00606 SimDlg.m_SimTimeStep = (int)(m_pDoc->getSimTimeStep() * 1000); // seconds to milliseconds 00607 00608 SimDlg.m_AllowLaneChanging = m_pDoc->getAllowLaneChanging(); 00609 SimDlg.m_TrafFileNoLanesDirPos = m_pDoc->getTrafFileNoLanesDirPos(); 00610 SimDlg.m_TrafFileNoLanesDirNeg = m_pDoc->getTrafFileNoLanesDirNeg(); 00611 SimDlg.m_LocOutputDetectorDirPos = m_pDoc->getLocOutputDetectorDirPos(); 00612 SimDlg.m_LocOutputDetectorDirNeg = m_pDoc->getLocOutputDetectorDirNeg(); 00613 00614 if(SimDlg.DoModal() == IDOK) 00615 { 00616 m_pDoc->setFileIn( SimDlg.m_FileIn ); 00617 m_pDoc->setFileOut( SimDlg.m_FileOut ); 00618 m_pDoc->setMetricsDir( SimDlg.m_MetricsDir ); 00619 m_pDoc->setFileType( SimDlg.m_FileType ); 00620 m_pDoc->setRoadLength( SimDlg.m_RoadLength ); 00621 m_pDoc->setDriveOnRight( SimDlg.m_DriveOnRight ); 00622 m_pDoc->setNoLanesDirPos( SimDlg.m_NoLanesDirPos); 00623 m_pDoc->setNoLanesDirNeg( SimDlg.m_NoLanesDirNeg); 00624 m_pDoc->setSimTimeStep( (double)SimDlg.m_SimTimeStep / 1000 ); // milliseconds to seconds 00625 00626 m_pDoc->setAllowLaneChanging( SimDlg.m_AllowLaneChanging ); 00627 m_pDoc->setTrafFileNoLanesDirPos( SimDlg.m_TrafFileNoLanesDirPos ); 00628 m_pDoc->setTrafFileNoLanesDirNeg( SimDlg.m_TrafFileNoLanesDirNeg ); 00629 m_pDoc->setLocOutputDetectorDirPos( SimDlg.m_LocOutputDetectorDirPos ); 00630 m_pDoc->setLocOutputDetectorDirNeg( SimDlg.m_LocOutputDetectorDirNeg ); 00631 00632 m_pDoc->UpdateDerivedMembers(true); // call setMod flag 00633 00634 SettingUpdateRedraw(); 00635 }; 00636 }
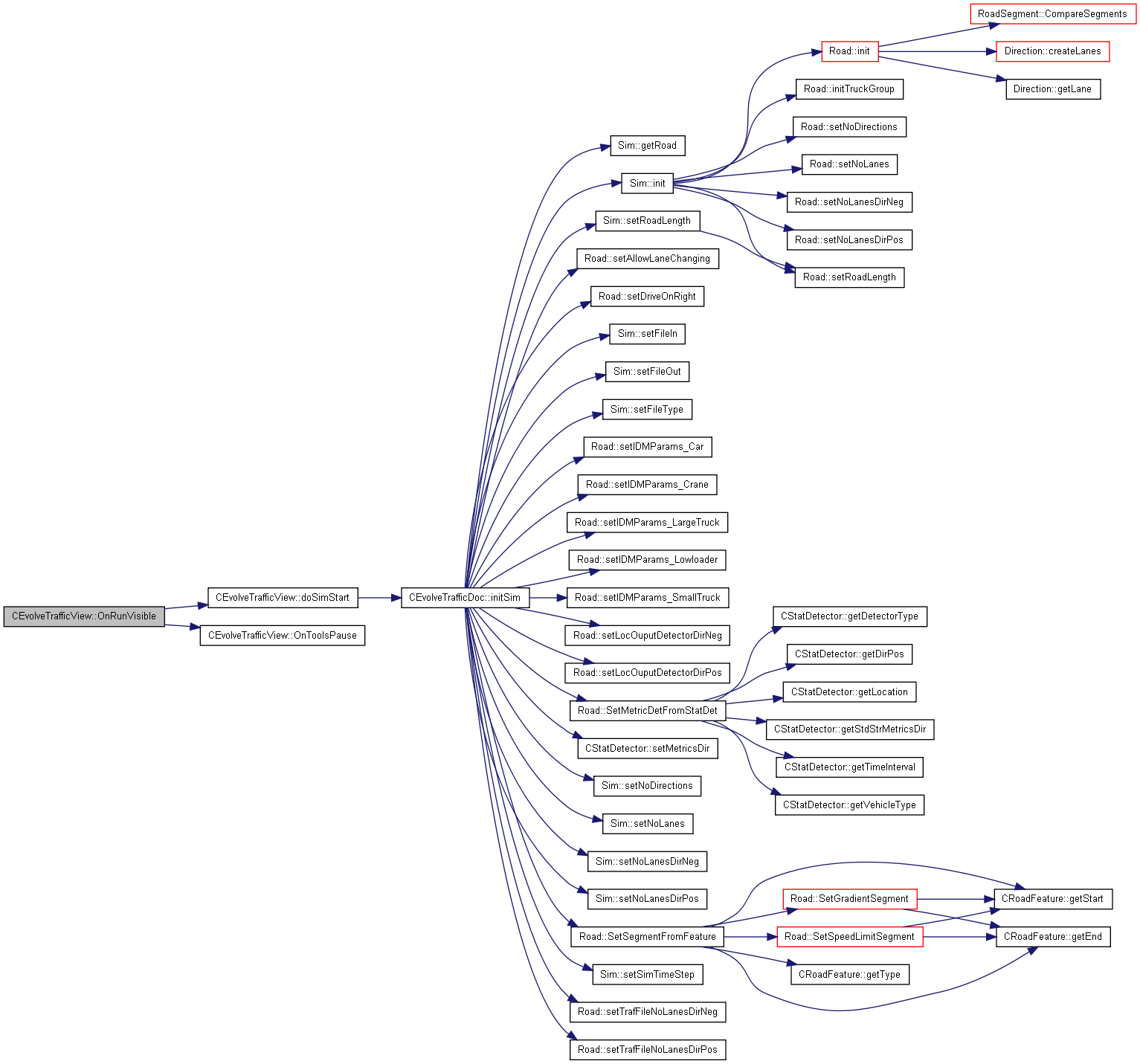
| void CEvolveTrafficView::OnRunVisible | ( | ) | [protected] |
Definition at line 354 of file EvolveTrafficView.cpp.
References doSimStart(), m_bInSimulation, m_bPause, and OnToolsPause().
00355 { 00356 if( !m_bInSimulation ) 00357 doSimStart(); 00358 else 00359 { 00360 if(m_bPause) // give this button start stop behaviour as well 00361 OnToolsPause(); 00362 else 00363 MessageBox("Simulation already running", "EvolveTraffic", MB_OK|MB_ICONWARNING); 00364 } 00365 }
| void CEvolveTrafficView::OnSize | ( | UINT | nType, | |
| int | cx, | |||
| int | cy | |||
| ) | [protected] |
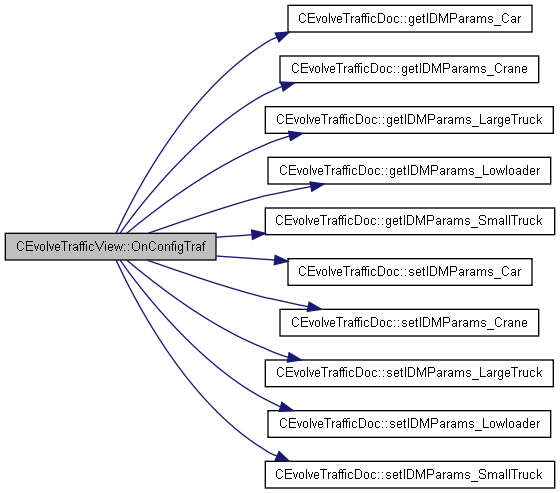
| void CEvolveTrafficView::OnConfigTraf | ( | ) | [protected] |
Definition at line 638 of file EvolveTrafficView.cpp.
References CEvolveTrafficDoc::getIDMParams_Car(), CEvolveTrafficDoc::getIDMParams_Crane(), CEvolveTrafficDoc::getIDMParams_LargeTruck(), CEvolveTrafficDoc::getIDMParams_Lowloader(), CEvolveTrafficDoc::getIDMParams_SmallTruck(), CTrafficConfigDlg::m_IDMParams_Car, CTrafficConfigDlg::m_IDMParams_Crane, CTrafficConfigDlg::m_IDMParams_LargeTruck, CTrafficConfigDlg::m_IDMParams_Lowloader, CTrafficConfigDlg::m_IDMParams_SmallTruck, m_pDoc, CEvolveTrafficDoc::setIDMParams_Car(), CEvolveTrafficDoc::setIDMParams_Crane(), CEvolveTrafficDoc::setIDMParams_LargeTruck(), CEvolveTrafficDoc::setIDMParams_Lowloader(), and CEvolveTrafficDoc::setIDMParams_SmallTruck().
00639 { 00640 CTrafficConfigDlg TrafDlg; 00641 00642 TrafDlg.m_IDMParams_Car = m_pDoc->getIDMParams_Car(); 00643 TrafDlg.m_IDMParams_SmallTruck = m_pDoc->getIDMParams_SmallTruck(); 00644 TrafDlg.m_IDMParams_LargeTruck = m_pDoc->getIDMParams_LargeTruck(); 00645 TrafDlg.m_IDMParams_Crane = m_pDoc->getIDMParams_Crane(); 00646 TrafDlg.m_IDMParams_Lowloader = m_pDoc->getIDMParams_Lowloader(); 00647 00648 if(TrafDlg.DoModal() == IDOK) 00649 { 00650 m_pDoc->setIDMParams_Car (TrafDlg.m_IDMParams_Car); 00651 m_pDoc->setIDMParams_SmallTruck (TrafDlg.m_IDMParams_SmallTruck); 00652 m_pDoc->setIDMParams_LargeTruck (TrafDlg.m_IDMParams_LargeTruck); 00653 m_pDoc->setIDMParams_Crane (TrafDlg.m_IDMParams_Crane); 00654 m_pDoc->setIDMParams_Lowloader (TrafDlg.m_IDMParams_Lowloader); 00655 00656 Invalidate(); 00657 } 00658 }
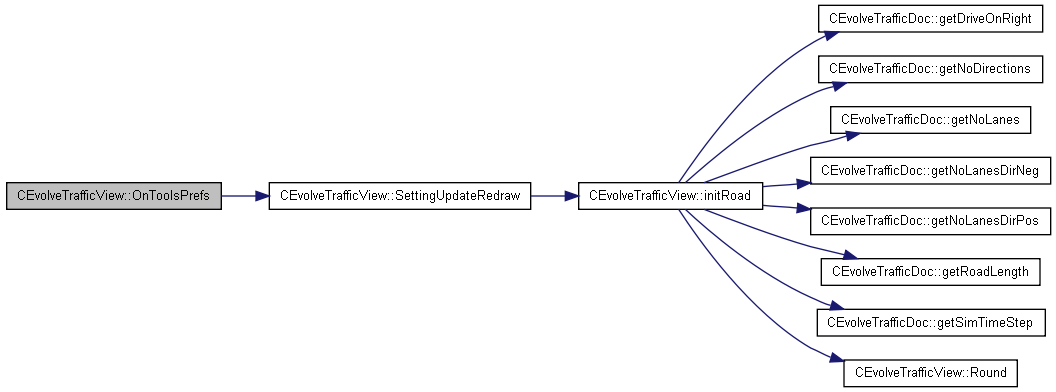
| void CEvolveTrafficView::OnToolsPrefs | ( | ) | [protected] |
Definition at line 660 of file EvolveTrafficView.cpp.
References m_Border_Btm, CPreferencesDlg::m_Border_Btm, m_Border_Lhs, CPreferencesDlg::m_Border_Lhs, m_Border_Rhs, CPreferencesDlg::m_Border_Rhs, m_Border_Top, CPreferencesDlg::m_Border_Top, m_bShowLegend, m_bShowVelocity, m_ExaggerateWidths, CPreferencesDlg::m_ExaggerateWidths, m_LaneWidth, CPreferencesDlg::m_LaneWidth, m_Scale, CPreferencesDlg::m_Scale, CPreferencesDlg::m_ShowLegend, CPreferencesDlg::m_ShowVelocity, m_TickLength, CPreferencesDlg::m_TickLength, m_TickStep, CPreferencesDlg::m_TickStep, m_TimeWarp, CPreferencesDlg::m_TimeWarp, m_VehicleLengthScale, CPreferencesDlg::m_VehicleLengthScale, m_VehicleWidth, CPreferencesDlg::m_VehicleWidth, and SettingUpdateRedraw().
00661 { 00662 CPreferencesDlg PrefsDlg; 00663 00664 PrefsDlg.m_Scale = m_Scale; 00665 PrefsDlg.m_ExaggerateWidths = m_ExaggerateWidths; 00666 PrefsDlg.m_TimeWarp = m_TimeWarp; 00667 PrefsDlg.m_TickStep = m_TickStep; 00668 00669 PrefsDlg.m_LaneWidth = m_LaneWidth / m_ExaggerateWidths; 00670 PrefsDlg.m_VehicleWidth = m_VehicleWidth/ m_ExaggerateWidths; 00671 PrefsDlg.m_TickLength = m_TickLength / m_ExaggerateWidths; 00672 00673 PrefsDlg.m_VehicleLengthScale = m_VehicleLengthScale; 00674 PrefsDlg.m_ShowVelocity = m_bShowVelocity ? 1 : 0; 00675 PrefsDlg.m_ShowLegend = m_bShowLegend ? 1 : 0; 00676 PrefsDlg.m_Border_Top = m_Border_Top; 00677 PrefsDlg.m_Border_Btm = m_Border_Btm; 00678 PrefsDlg.m_Border_Lhs = m_Border_Lhs; 00679 PrefsDlg.m_Border_Rhs = m_Border_Rhs; 00680 00681 if(PrefsDlg.DoModal() == IDOK) 00682 { 00683 m_Scale = PrefsDlg.m_Scale; 00684 m_ExaggerateWidths = PrefsDlg.m_ExaggerateWidths; 00685 m_TimeWarp = PrefsDlg.m_TimeWarp; 00686 m_TickStep = PrefsDlg.m_TickStep; 00687 00688 m_LaneWidth = PrefsDlg.m_LaneWidth * m_ExaggerateWidths; 00689 m_VehicleWidth = PrefsDlg.m_VehicleWidth * m_ExaggerateWidths; 00690 m_TickLength = PrefsDlg.m_TickLength * m_ExaggerateWidths; 00691 00692 m_VehicleLengthScale = PrefsDlg.m_VehicleLengthScale; 00693 m_bShowVelocity = PrefsDlg.m_ShowVelocity == 0 ? false : true; 00694 m_bShowLegend = PrefsDlg.m_ShowLegend == 0 ? false : true; 00695 m_Border_Top = PrefsDlg.m_Border_Top; 00696 m_Border_Btm = PrefsDlg.m_Border_Btm; 00697 m_Border_Lhs = PrefsDlg.m_Border_Lhs; 00698 m_Border_Rhs = PrefsDlg.m_Border_Rhs; 00699 00700 SettingUpdateRedraw(); 00701 } 00702 }
| void CEvolveTrafficView::OnToolsPause | ( | ) | [protected] |
Definition at line 438 of file EvolveTrafficView.cpp.
References m_bPause, m_PauseTime, and m_StartRealTime.
Referenced by OnRunVisible().
00439 { 00440 if(m_bPause) // currently paused - about to not be 00441 { 00442 m_PauseTime = timeGetTime() - m_PauseTime; // calc total pause time 00443 m_StartRealTime += m_PauseTime; // so time just carries on 00444 } 00445 else // not paused - but about to be 00446 m_PauseTime = timeGetTime(); // save initial pause time 00447 00448 m_bPause = !m_bPause; // so pause/start behaviour 00449 00450 }
| void CEvolveTrafficView::OnToolsZoomin | ( | ) | [protected] |
Definition at line 517 of file EvolveTrafficView.cpp.
References m_Scale, and SetZoomScale().
00518 { 00519 SetZoomScale(m_Scale + 0.2); // MAGIC NUMBER - should it be an option? 00520 }

| void CEvolveTrafficView::OnToolsZoomout | ( | ) | [protected] |
Definition at line 522 of file EvolveTrafficView.cpp.
References m_Scale, and SetZoomScale().
00523 { 00524 SetZoomScale(m_Scale - 0.2); // MAGIC NUMBER - should it be an option? 00525 }

| void CEvolveTrafficView::OnToolsSpeedup | ( | ) | [protected] |
Definition at line 527 of file EvolveTrafficView.cpp.
References m_TimeWarp, and ValidateTimeWarp().
00528 { 00529 m_TimeWarp += 1.0; // MAGIC NUMBER - should it be an option? 00530 00531 ValidateTimeWarp(); 00532 }

| void CEvolveTrafficView::OnToolsSlowdown | ( | ) | [protected] |
Definition at line 534 of file EvolveTrafficView.cpp.
References m_TimeWarp, and ValidateTimeWarp().
00535 { 00536 m_TimeWarp -= 1.0; // MAGIC NUMBER - should it be an option? 00537 00538 ValidateTimeWarp(); 00539 }

| void CEvolveTrafficView::OnKeyDown | ( | UINT | nChar, | |
| UINT | nRepCnt, | |||
| UINT | nFlags | |||
| ) | [protected] |
Definition at line 541 of file EvolveTrafficView.cpp.
References m_RoadLength, and Round().
00542 { 00543 CScrollView::OnKeyDown(nChar, nRepCnt, nFlags); 00544 00545 POINT curPoint = GetScrollPosition(); 00546 int deltaX = Round(m_RoadLength/10); // MAGIC NUMBER - scroll 1/10 of road 00547 00548 switch(nChar) 00549 { 00550 case VK_RIGHT: 00551 curPoint.x += deltaX; 00552 break; 00553 case VK_LEFT: 00554 curPoint.x -= deltaX; 00555 break; 00556 case VK_HOME: 00557 curPoint.x = 0; 00558 break; 00559 case VK_END: 00560 CSize temp = GetTotalSize(); 00561 curPoint.x = temp.cx; 00562 break; 00563 } 00564 ScrollToPosition(curPoint); 00565 Invalidate(FALSE); 00566 }

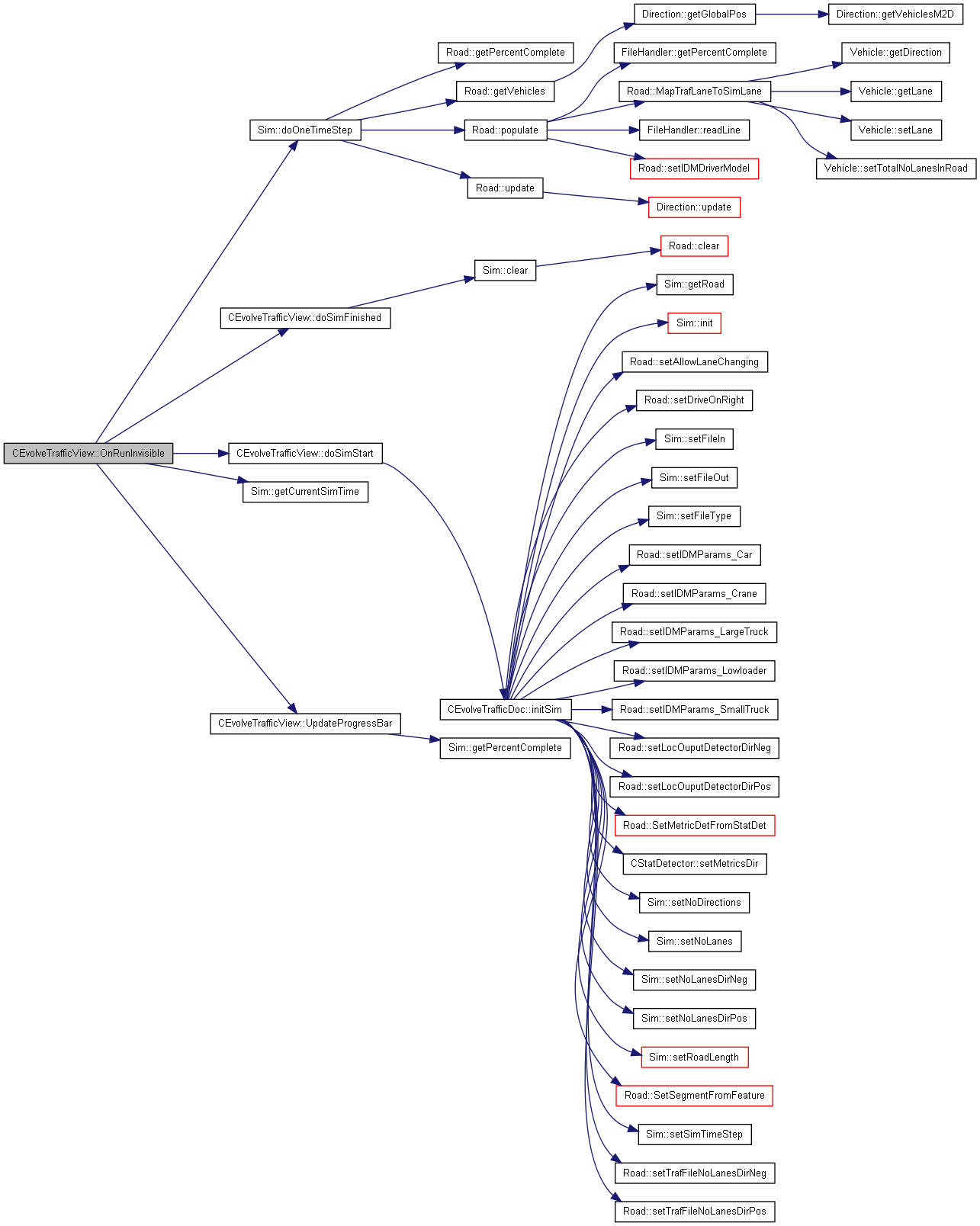
| void CEvolveTrafficView::OnRunInvisible | ( | ) | [protected] |
Definition at line 367 of file EvolveTrafficView.cpp.
References Sim::doOneTimeStep(), doSimFinished(), doSimStart(), Sim::getCurrentSimTime(), m_bInSimulation, m_CurentRealTime, m_CurentSimTime, m_pDoc, CEvolveTrafficDoc::m_Sim, m_StartRealTime, and UpdateProgressBar().
00368 { 00369 if( !m_bInSimulation ) 00370 { 00371 int result = MessageBox("Running EvolveTraffic in this mode means:\n" 00372 "- only the progress bar is updated;\n" 00373 "- the program will appear to be unresponsive until the simulation is complete.\n" 00374 "Are you sure that you want to proceed in this mode?", 00375 "EvolveTraffic", MB_YESNO|MB_ICONWARNING); 00376 00377 if(result == IDYES) // we're cleared to go 00378 { 00379 doSimStart(); 00380 bool bInSim = true; // local inSim - we want class-wide InSim to persist longer than this loop 00381 while(bInSim) 00382 { 00383 m_pDoc->m_Sim.doOneTimeStep(&bInSim); // bInSim becomes false when sim is over 00384 UpdateProgressBar(); 00385 } 00386 m_CurentSimTime = m_pDoc->m_Sim.getCurrentSimTime(); 00387 m_CurentRealTime = timeGetTime() - m_StartRealTime; // no need for PauseTime since no pause 00388 doSimFinished(true); // no need to check if it's finished - true means completed 00389 } 00390 } 00391 else 00392 MessageBox("Simulation already running", "EvolveTraffic", MB_OK|MB_ICONWARNING); 00393 00394 }
| void CEvolveTrafficView::OnConfigFeatures | ( | ) | [protected] |
Definition at line 704 of file EvolveTrafficView.cpp.
References CEvolveTrafficDoc::getRoadFeatures(), m_pDoc, m_RoadLength, CRoadFeaturesDlg::m_RoadLength, CRoadFeaturesDlg::m_vRoadFeatures, and CEvolveTrafficDoc::setRoadFeatures().
00705 { 00706 CRoadFeaturesDlg FeaturesDlg; 00707 00708 FeaturesDlg.m_RoadLength = m_RoadLength; // for validation purposes only 00709 FeaturesDlg.m_vRoadFeatures.Copy( *(m_pDoc->getRoadFeatures()) ); 00710 00711 if( FeaturesDlg.DoModal() == IDOK ) 00712 m_pDoc->setRoadFeatures( &(FeaturesDlg.m_vRoadFeatures) ); 00713 00714 Invalidate(); 00715 }

| void CEvolveTrafficView::OnConfigMetrics | ( | ) | [protected] |
Definition at line 717 of file EvolveTrafficView.cpp.
References CEvolveTrafficDoc::getStatDetectors(), m_pDoc, m_RoadLength, CStatDetectorDlg::m_RoadLength, CStatDetectorDlg::m_vStatDetectors, and CEvolveTrafficDoc::setStatDetectors().
00718 { 00719 CStatDetectorDlg StatDetDlg; 00720 00721 StatDetDlg.m_RoadLength = m_RoadLength; // for validation purposes only 00722 StatDetDlg.m_vStatDetectors.Copy( *(m_pDoc->getStatDetectors()) ); 00723 00724 if( StatDetDlg.DoModal() == IDOK ) 00725 m_pDoc->setStatDetectors( &(StatDetDlg.m_vStatDetectors) ); 00726 00727 Invalidate(); 00728 }

| void CEvolveTrafficView::OnUpdateToolsPause | ( | CCmdUI * | pCmdUI | ) | [protected] |
Definition at line 465 of file EvolveTrafficView.cpp.
References m_bInSimulation, and m_bPause.
00466 { 00467 if(m_bInSimulation) 00468 { 00469 pCmdUI->Enable(true); 00470 if(m_bPause) 00471 pCmdUI->SetText("&Resume\tF9"); 00472 else 00473 pCmdUI->SetText("&Pause\tF9"); 00474 } 00475 else 00476 pCmdUI->Enable(false); 00477 00478 }
| void CEvolveTrafficView::OnUpdateToolsSpeedup | ( | CCmdUI * | pCmdUI | ) | [protected] |
Definition at line 480 of file EvolveTrafficView.cpp.
References m_bInSimulation.
00481 { 00482 if(m_bInSimulation) 00483 pCmdUI->Enable(true); 00484 else 00485 pCmdUI->Enable(false); 00486 }
| void CEvolveTrafficView::OnUpdateToolsSlowdown | ( | CCmdUI * | pCmdUI | ) | [protected] |
Definition at line 488 of file EvolveTrafficView.cpp.
References m_bInSimulation.
00489 { 00490 if(m_bInSimulation) 00491 pCmdUI->Enable(true); 00492 else 00493 pCmdUI->Enable(false); 00494 }
| void CEvolveTrafficView::OnToolsStop | ( | ) | [protected] |
Definition at line 452 of file EvolveTrafficView.cpp.
References doSimFinished().
00453 { 00454 doSimFinished(false); // false means not compelted, but stopped midway through 00455 }

| void CEvolveTrafficView::OnUpdateToolsStop | ( | CCmdUI * | pCmdUI | ) | [protected] |
Definition at line 457 of file EvolveTrafficView.cpp.
References m_bInSimulation.
00458 { 00459 if(m_bInSimulation) 00460 pCmdUI->Enable(true); 00461 else 00462 pCmdUI->Enable(false); 00463 }
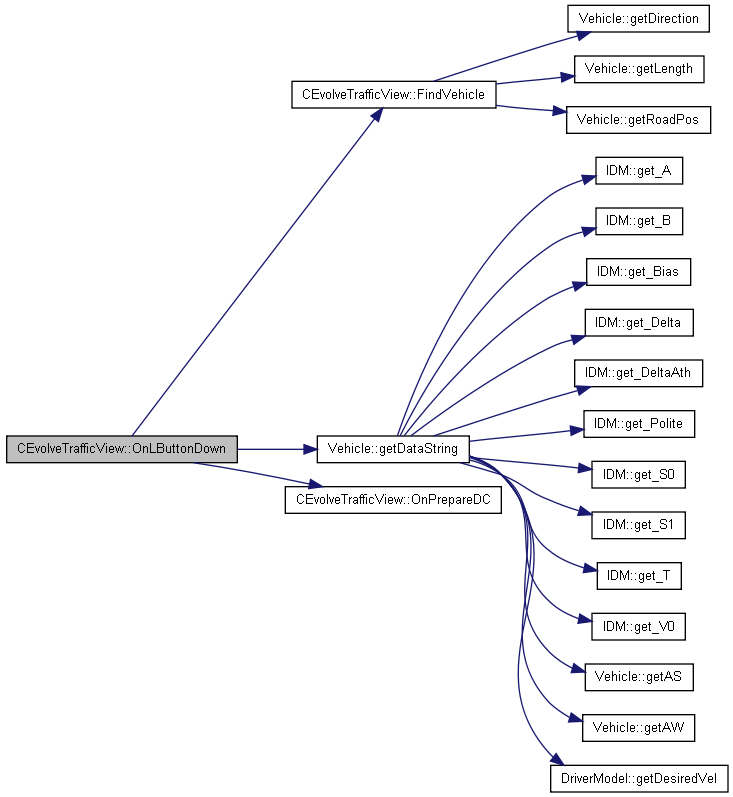
| void CEvolveTrafficView::OnLButtonDown | ( | UINT | nFlags, | |
| CPoint | point | |||
| ) | [protected] |
Definition at line 734 of file EvolveTrafficView.cpp.
References FindVehicle(), Vehicle::getDataString(), m_Border_Lhs, m_bPause, m_BtmEdge, m_DataTip, m_DriveOnRight, m_LaneWidth, m_NoLanes, m_TopEdge, and OnPrepareDC().
00735 { 00736 if(m_bPause) // only if paused 00737 { 00738 // Get road coords 00739 CClientDC aDC(this); 00740 OnPrepareDC(&aDC); 00741 CPoint ptRoad = point; 00742 aDC.DPtoLP(&ptRoad); 00743 ptRoad.x -= m_Border_Lhs; 00744 00745 if(ptRoad.y < m_BtmEdge && ptRoad.y > m_TopEdge) // only if within road 00746 { 00747 // Get lane 00748 int iLane = 1; 00749 int TopOfLane = m_BtmEdge; 00750 00751 while(ptRoad.y < TopOfLane) 00752 { 00753 TopOfLane = m_BtmEdge - iLane*m_LaneWidth; 00754 iLane++; 00755 } 00756 // so it was in the previous lane, but zero based array, i.e. 00757 iLane -= 2; 00758 if(!m_DriveOnRight) 00759 iLane = m_NoLanes - iLane -1; 00760 00761 // Find vehicle at pos x in lane iLane 00762 Vehicle* pVeh = FindVehicle(iLane, ptRoad.x); 00763 00764 if(pVeh != NULL) // assemble datastring and display 00765 { 00766 CRect rect(point.x,point.y,point.x+100, point.y+100); // notice point in screen coords 00767 m_DataTip.Show(rect,pVeh->getDataString()); 00768 } 00769 } 00770 } 00771 00772 CScrollView::OnLButtonDown(nFlags, point); 00773 }
| void CEvolveTrafficView::OnFileSaveImage | ( | ) | [protected] |
Definition at line 572 of file EvolveTrafficView.cpp.
References CWindowToBMP::Write().
00573 { 00574 CFileDialog FileDlg( 00575 FALSE, // TRUE if File Open, FALSE if File Save As 00576 _T("*.bmp"), // the default file extension 00577 NULL, // the initial filename that appears 00578 OFN_PATHMUSTEXIST | OFN_HIDEREADONLY | OFN_OVERWRITEPROMPT,//flags for customizing the appearance 00579 "Bitmap files (*.bmp) |*.bmp||", // file filters 00580 this); // pointer to FileCialog's parent object 00581 00582 if(FileDlg.DoModal() == IDOK) 00583 { 00584 CString file = FileDlg.GetPathName(); 00585 UpdateWindow(); // to get rid of dialog 00586 CWindowToBMP convert; 00587 if( convert.Write(file, this) ) 00588 MessageBox("Image saved.","EvolveTraffic", MB_OK|MB_ICONINFORMATION); 00589 else 00590 MessageBox("Image saving failed.","EvolveTraffic", MB_OK|MB_ICONWARNING); 00591 } 00592 }

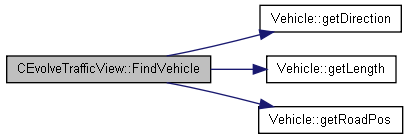
| Vehicle * CEvolveTrafficView::FindVehicle | ( | int | iLane, | |
| int | location | |||
| ) | [private] |
Definition at line 775 of file EvolveTrafficView.cpp.
References Vehicle::getDirection(), Vehicle::getLength(), Vehicle::getRoadPos(), m_VehicleLengthScale, and m_VehiclePositions.
Referenced by OnLButtonDown().
00776 { 00777 Vehicle* pVeh = NULL; 00778 std::vector<Vehicle*> vLaneVehs = m_VehiclePositions.at(iLane); 00779 00780 for(int i = 0; i < vLaneVehs.size(); i++) 00781 { 00782 pVeh = vLaneVehs.at(i); 00783 int front = pVeh->getRoadPos(); 00784 int length = pVeh->getLength() * m_VehicleLengthScale; 00785 00786 bool bOnVehicle = false; 00787 if(pVeh->getDirection()) 00788 { 00789 if( location < front && location > front - length ) 00790 bOnVehicle = true; 00791 } 00792 else 00793 { 00794 if( location > front && location < front + length ) 00795 bOnVehicle = true; 00796 } 00797 00798 if( bOnVehicle ) 00799 return pVeh; 00800 } 00801 00802 return NULL; 00803 }
| BOOL CEvolveTrafficView::WriteWindowToDIB | ( | LPTSTR | szFile, | |
| CWnd * | pWnd | |||
| ) | [private] |
| void CEvolveTrafficView::SetZoomScale | ( | double | newScale | ) | [private] |
Definition at line 181 of file EvolveTrafficView.cpp.
References m_ClientRect, m_DrawArea, m_Scale, MIN_VIEW_SCALE, and Round().
Referenced by OnToolsZoomin(), and OnToolsZoomout().
00182 { 00183 if(newScale > MIN_VIEW_SCALE) 00184 { 00185 double oldZoomFactor = m_Scale; 00186 00187 CPoint centerScrollPosition = GetScrollPosition(); 00188 CRect ClientRect(0,0,0,0); 00189 centerScrollPosition.x += m_ClientRect.right/2; 00190 centerScrollPosition.y += m_ClientRect.bottom/2; 00191 00192 m_Scale = newScale; 00193 00194 CSize displaySize; 00195 displaySize.cx = Round(m_DrawArea.cx * m_Scale); 00196 displaySize.cy = Round(m_DrawArea.cy * m_Scale); 00197 SetScrollSizes(MM_TEXT,displaySize); 00198 00199 int newXScrollPosition = Round((centerScrollPosition.x / oldZoomFactor) * m_Scale); 00200 int newYScrollPosition = Round((centerScrollPosition.y / oldZoomFactor) * m_Scale); 00201 00202 newXScrollPosition -= m_ClientRect.right/2; 00203 newYScrollPosition -= m_ClientRect.bottom/2; 00204 ScrollToPosition(CPoint(newXScrollPosition,newYScrollPosition)); 00205 } 00206 else 00207 { 00208 CString str; str.Format("You cannot zoom out any further - minimum view scale is 0.1.", MIN_VIEW_SCALE); 00209 MessageBox(str, "EvolveTraffic", MB_OK|MB_ICONWARNING); 00210 } 00211 00212 Invalidate(FALSE); 00213 }

| void CEvolveTrafficView::ValidateTimeWarp | ( | ) | [private] |
Definition at line 502 of file EvolveTrafficView.cpp.
References m_MaxTimeWarp, and m_TimeWarp.
Referenced by OnToolsSlowdown(), and OnToolsSpeedup().
00503 { 00504 if(m_TimeWarp > m_MaxTimeWarp) 00505 { 00506 m_TimeWarp = m_MaxTimeWarp; 00507 CString str; str.Format("Maximum time warp reached (%.2f) for this simulation.",m_TimeWarp); 00508 MessageBox(str,"EvolveTraffic",MB_OK|MB_ICONINFORMATION); 00509 } 00510 if(m_TimeWarp < 0.5) // set half speed as minimum 00511 { 00512 m_TimeWarp = 1.0; 00513 MessageBox("Half of real-time speed is the minimum time warp.","EvolveTraffic",MB_OK|MB_ICONINFORMATION); 00514 } 00515 }
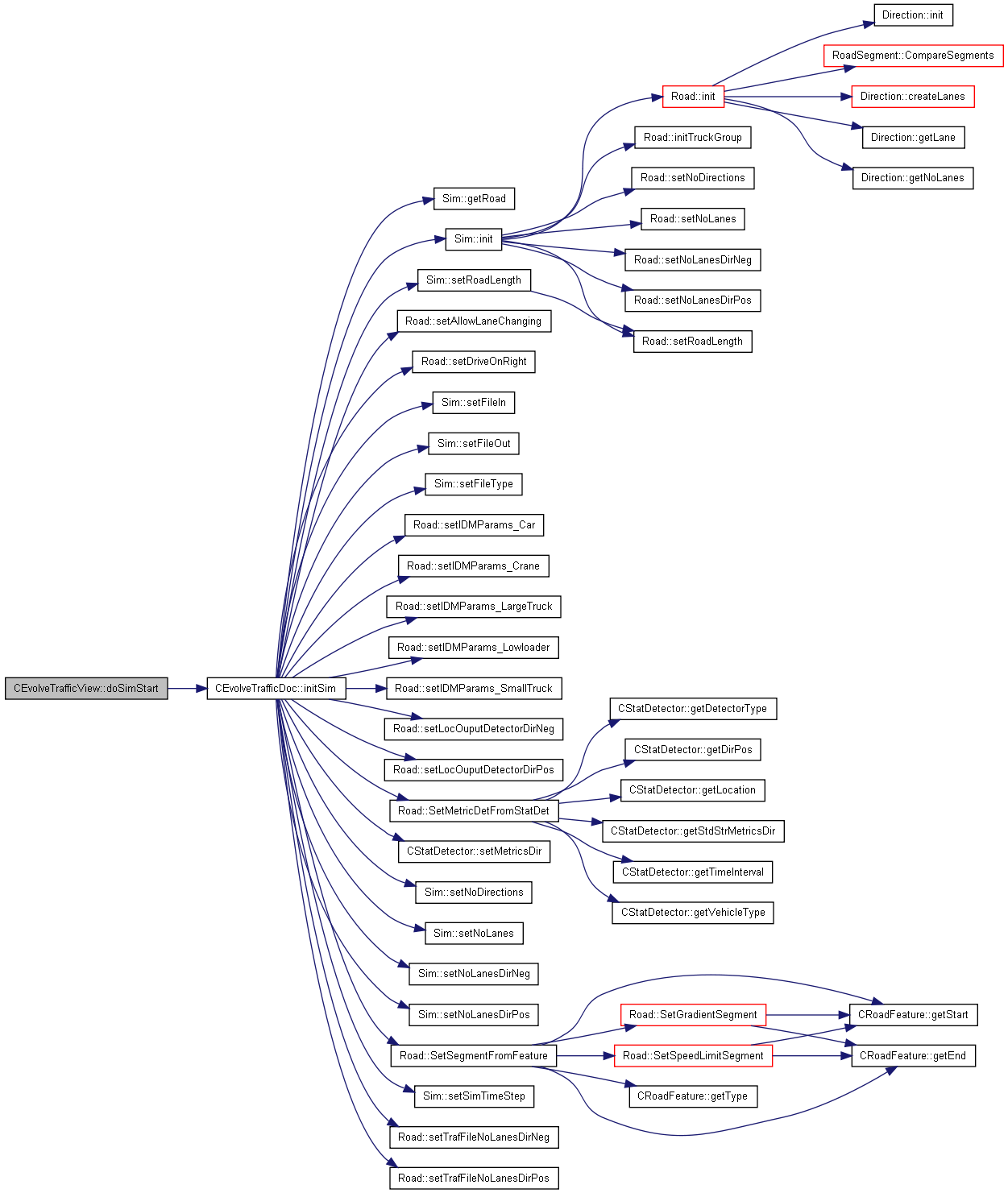
| void CEvolveTrafficView::doSimStart | ( | ) | [private] |
Definition at line 396 of file EvolveTrafficView.cpp.
References CEvolveTrafficDoc::initSim(), m_bInSimulation, m_CurentSimTime, m_pDoc, m_pProgBar, and m_StartRealTime.
Referenced by OnRunInvisible(), and OnRunVisible().
00397 { 00398 bool statusOK = m_pDoc->initSim(); 00399 if(statusOK) 00400 { 00401 ((CEvolveTrafficApp*)AfxGetApp())->setInSimulation(true); 00402 m_StartRealTime = timeGetTime(); 00403 m_bInSimulation = true; // this means the doLoop() becomes active 00404 m_CurentSimTime = 0.0; 00405 m_pProgBar = new CProgressBar; 00406 m_pProgBar->Create("Percent Complete 0%"); 00407 Invalidate(); // refresh screen before starting 00408 } 00409 }
| int CEvolveTrafficView::Round | ( | double | val | ) | [inline, private] |
Definition at line 103 of file EvolveTrafficView.h.
Referenced by doLoop(), DrawLegend(), DrawRoadSegments(), DrawTimer(), initRoad(), OnInitialUpdate(), OnKeyDown(), and SetZoomScale().
| void CEvolveTrafficView::doSimFinished | ( | bool | bCompleted | ) | [private] |
Definition at line 411 of file EvolveTrafficView.cpp.
References Sim::clear(), m_bInSimulation, m_LastPercentComplete, m_pDoc, m_pProgBar, CEvolveTrafficDoc::m_Sim, and m_VehiclePositions.
Referenced by doLoop(), OnRunInvisible(), and OnToolsStop().
00412 { 00413 Invalidate(); // draw last screen 00414 m_bInSimulation = false; // tell overall class we're done 00415 ((CEvolveTrafficApp*)AfxGetApp())->setInSimulation(false); // tell the sim loop to stop 00416 m_pProgBar->Clear(); // clear and 00417 delete m_pProgBar; // delete the current progress bar 00418 m_pDoc->m_Sim.clear(); // clear the simulation 00419 m_LastPercentComplete = 0; // reset the percent complete 00420 m_VehiclePositions.clear(); // clear vehicles 00421 00422 if(bCompleted) 00423 MessageBox("The simulation has finished.","EvolveTraffic",MB_OK|MB_ICONINFORMATION); 00424 }

| void CEvolveTrafficView::UpdateDrawRegion | ( | ) | [private] |
| void CEvolveTrafficView::SettingUpdateRedraw | ( | ) | [private] |
Definition at line 496 of file EvolveTrafficView.cpp.
References initRoad().
Referenced by OnConfigSim(), and OnToolsPrefs().
00497 { 00498 initRoad(); // re-do the road properties 00499 Invalidate(); // draw it 00500 }
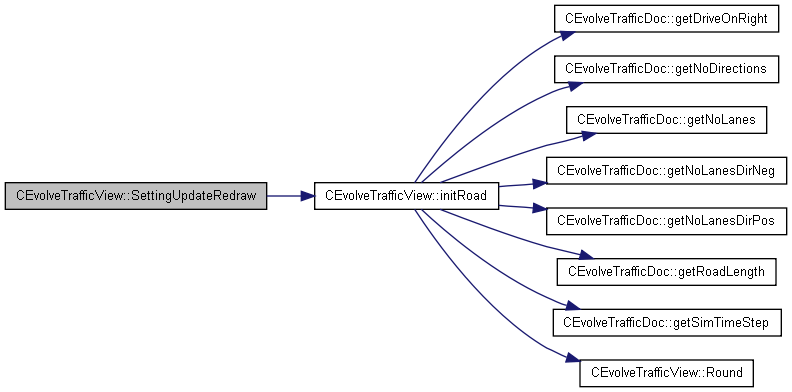
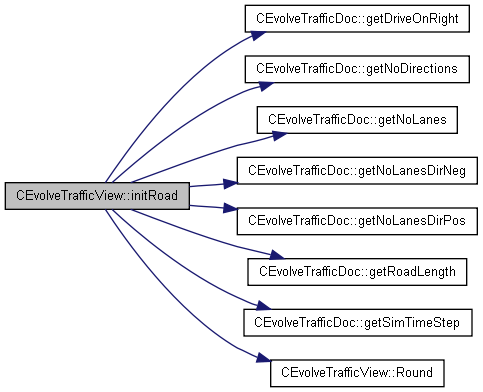
| void CEvolveTrafficView::initRoad | ( | ) | [private] |
Definition at line 215 of file EvolveTrafficView.cpp.
References CEvolveTrafficDoc::getDriveOnRight(), CEvolveTrafficDoc::getNoDirections(), CEvolveTrafficDoc::getNoLanes(), CEvolveTrafficDoc::getNoLanesDirNeg(), CEvolveTrafficDoc::getNoLanesDirPos(), CEvolveTrafficDoc::getRoadLength(), CEvolveTrafficDoc::getSimTimeStep(), m_Border_Btm, m_Border_Lhs, m_Border_Rhs, m_Border_Top, m_BtmEdge, m_DrawArea, m_DriveOnRight, m_LaneWidth, m_nLanesOnBtm, m_nLanesOnTop, m_NoDirections, m_NoLanes, m_NoLanesDirNeg, m_NoLanesDirPos, m_NoTicks, m_pDoc, m_RoadLength, m_RoadWidth, m_Scale, m_SimTimeStep, m_TickStep, m_TopEdge, and Round().
Referenced by OnInitialUpdate(), and SettingUpdateRedraw().
00216 { 00217 m_DriveOnRight = m_pDoc->getDriveOnRight(); 00218 m_RoadLength = m_pDoc->getRoadLength(); 00219 m_NoLanes = m_pDoc->getNoLanes(); 00220 m_NoLanesDirPos = m_pDoc->getNoLanesDirPos(); 00221 m_NoLanesDirNeg = m_pDoc->getNoLanesDirNeg(); 00222 m_NoDirections = m_pDoc->getNoDirections(); 00223 m_RoadWidth = m_NoLanes * m_LaneWidth; 00224 m_NoTicks = (int)(m_RoadLength/m_TickStep)+1; 00225 00226 m_nLanesOnTop = m_DriveOnRight ? m_NoLanesDirNeg : m_NoLanesDirPos; 00227 m_nLanesOnBtm = m_DriveOnRight ? m_NoLanesDirPos : m_NoLanesDirNeg; 00228 m_TopEdge = -m_nLanesOnTop*m_LaneWidth; 00229 m_BtmEdge = m_nLanesOnBtm*m_LaneWidth; 00230 00231 m_SimTimeStep = Round(1000 * m_pDoc->getSimTimeStep()); // constant sim time step 00232 00233 m_DrawArea.cy = m_Border_Top + m_Border_Btm + m_RoadWidth; 00234 m_DrawArea.cx = m_Border_Lhs + m_Border_Rhs + m_RoadLength; 00235 00236 CSize scrolls; 00237 scrolls.cx = m_DrawArea.cx*m_Scale; // when scale is not 1.0 00238 scrolls.cy = m_DrawArea.cy*m_Scale; 00239 CScrollView::SetScrollSizes(MM_TEXT, scrolls); 00240 }
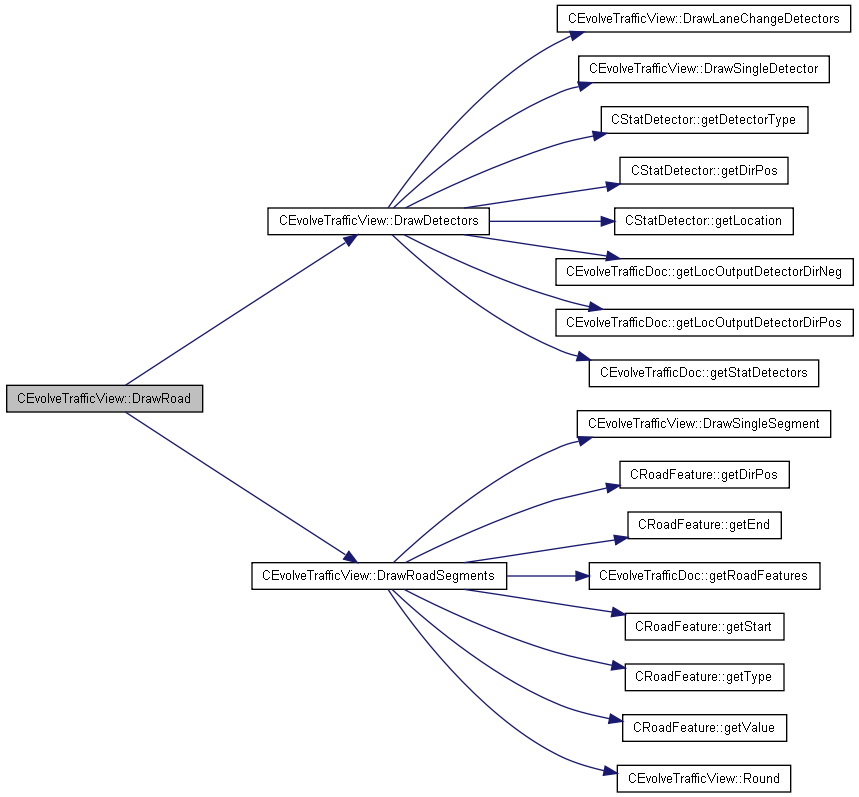
| void CEvolveTrafficView::DrawRoad | ( | CMemDC * | pDC | ) | [private] |
Definition at line 809 of file EvolveTrafficView.cpp.
References CLR_ROAD_LINES, CLR_ROAD_SURFACE, DrawDetectors(), DrawRoadSegments(), m_Border_Lhs, m_BtmEdge, m_LaneWidth, m_NoDirections, m_NoLanes, m_RoadLength, m_RoadWidth, and m_TopEdge.
Referenced by OnDraw().
00810 { 00811 // Prepare brushes 00812 CPen BlackPen(PS_SOLID, 0, CLR_ROAD_LINES); 00813 CPen BlackDashPen(PS_DASH, 0, CLR_ROAD_LINES); 00814 00815 // fill the road surface 00816 pDC->FillSolidRect(m_Border_Lhs,m_TopEdge,m_RoadLength,m_RoadWidth, CLR_ROAD_SURFACE); 00817 // draw road segements 00818 DrawRoadSegments(pDC); 00819 00820 pDC->SelectObject(&BlackPen); 00821 // Top edge of the road 00822 pDC->MoveTo(m_Border_Lhs,m_TopEdge); 00823 pDC->LineTo(m_Border_Lhs+m_RoadLength,m_TopEdge); 00824 // bottom edge of the road 00825 pDC->MoveTo(m_Border_Lhs,m_BtmEdge); 00826 pDC->LineTo(m_Border_Lhs+m_RoadLength,m_BtmEdge); 00827 // for each lane 00828 pDC->SelectObject(&BlackDashPen); 00829 int LaneEdge = m_BtmEdge; 00830 for (int i = 0; i < m_NoLanes-1; i++) 00831 { // from bottom working the way up 00832 LaneEdge -= m_LaneWidth; 00833 pDC->MoveTo(m_Border_Lhs,LaneEdge); 00834 pDC->LineTo(m_Border_Lhs+m_RoadLength,LaneEdge); 00835 } 00836 // Divide carraigeway 00837 pDC->SelectObject(&BlackPen); 00838 if(m_NoDirections == 2) 00839 { 00840 pDC->MoveTo(m_Border_Lhs,0); 00841 pDC->LineTo(m_Border_Lhs+m_RoadLength,0); 00842 } 00843 00844 DrawDetectors(pDC); 00845 }
| void CEvolveTrafficView::DrawRuler | ( | CMemDC * | pDC | ) | [private] |
Definition at line 1175 of file EvolveTrafficView.cpp.
References CLR_BACKGRND, CLR_RULER_LINES, CLR_RULER_TEXT, m_Border_Lhs, m_BtmEdge, m_NoTicks, m_TickLength, and m_TickStep.
Referenced by OnDraw().
01176 { 01177 int ypos = m_BtmEdge; 01178 01179 //int ypos = m_YCoordTop; //m_ClientRect.Height()/2 + m_RoadWidth/2; 01180 CPen RulerLinesPen(PS_SOLID, 0, CLR_RULER_LINES); 01181 pDC->SelectObject(&RulerLinesPen); 01182 pDC->SetTextColor(CLR_RULER_TEXT); 01183 pDC->SetBkColor(CLR_BACKGRND); 01184 01185 for(int i = 0; i < m_NoTicks; i++) 01186 { 01187 int xpos = m_Border_Lhs+i*m_TickStep; 01188 pDC->MoveTo(xpos,ypos); 01189 pDC->LineTo(xpos,ypos+m_TickLength); 01190 CString str; str.Format("%d m",i*m_TickStep); 01191 pDC->TextOut(xpos+5,ypos+10,str); 01192 } 01193 }
| void CEvolveTrafficView::DrawTimer | ( | CMemDC * | pDC | ) | [private] |
Definition at line 902 of file EvolveTrafficView.cpp.
References CLR_BACKGRND, CLR_LEGEND_TEXT, Sim::getCurrentSimTime(), HOURS_PER_DAY, m_bInSimulation, m_Border_Lhs, m_Border_Top, m_bPause, m_ClientRect, m_CurentRealTime, m_CurentSimTime, m_pDoc, m_Scale, CEvolveTrafficDoc::m_Sim, m_StartRealTime, MINS_PER_HOUR, Round(), SECS_PER_HOUR, and SECS_PER_MIN.
Referenced by OnDraw().
00903 { 00904 pDC->SetTextColor(CLR_LEGEND_TEXT); 00905 pDC->SetBkColor(CLR_BACKGRND); 00906 00907 // Draw the simulation time 00908 int ypos = Round(-(m_ClientRect.Height()/2)/m_Scale)+m_Border_Top; // this keeps the timer position scale invariant 00909 int xpos = m_Border_Lhs; 00910 00911 if(m_bInSimulation) 00912 m_CurentSimTime = m_pDoc->m_Sim.getCurrentSimTime(); 00913 00914 double temp = m_CurentSimTime; int day = (int)(temp/(HOURS_PER_DAY * SECS_PER_HOUR)); 00915 temp = temp - day * HOURS_PER_DAY * SECS_PER_HOUR; int hr = (int)(temp/(SECS_PER_HOUR)); 00916 temp = temp - hr * SECS_PER_HOUR; int min = (int)(temp/(MINS_PER_HOUR)); 00917 temp = temp - min * SECS_PER_MIN; double sec = temp; 00918 00919 CString SimStr; SimStr.Format("Sim. Time - Day: %d - %d:%02d:%05.2f",day,hr,min,sec); 00920 CSize strSimSize = pDC->GetTextExtent(SimStr); // so text is always inside the window 00921 pDC->TextOut(xpos,ypos,SimStr); // change + to - if drawn on bottom 00922 00923 // draw the real elapsed time 00924 if(m_bInSimulation && !m_bPause) // only update if we're simulating and not paused 00925 m_CurentRealTime = timeGetTime() - m_StartRealTime; 00926 00927 temp = (double)m_CurentRealTime/1000; day = (int)(temp/(HOURS_PER_DAY * SECS_PER_HOUR)); 00928 temp = temp - day * HOURS_PER_DAY * SECS_PER_HOUR; hr = (int)(temp/(SECS_PER_HOUR)); 00929 temp = temp - hr * SECS_PER_HOUR; min = (int)(temp/(MINS_PER_HOUR)); 00930 temp = temp - min * SECS_PER_MIN; sec = temp; 00931 00932 CString RealStr; RealStr.Format("Real Time - Day: %d - %d:%02d:%05.2f",day,hr,min,sec); 00933 CSize strRealSize = pDC->GetTextExtent(RealStr); // so text is always inside the window 00934 pDC->TextOut(xpos,ypos + strRealSize.cy*1.2 ,RealStr); // 20% sapce between strings | change + to - if drawn on bottom 00935 00936 }
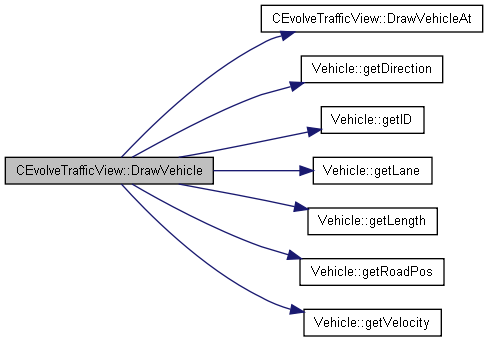
Definition at line 847 of file EvolveTrafficView.cpp.
References DrawVehicleAt(), Vehicle::getDirection(), Vehicle::getID(), Vehicle::getLane(), Vehicle::getLength(), Vehicle::getRoadPos(), Vehicle::getVelocity(), m_Border_Lhs, m_bShowVelocity, m_BtmEdge, m_DriveOnRight, m_LaneWidth, M_PER_S_TO_KM_PER_H, m_TopEdge, m_VehicleLengthScale, and m_VehicleWidth.
Referenced by OnDraw().
00848 { 00849 bool DirPointsRight = pVeh->getDirection(); 00850 int lane = pVeh->getLane(); 00851 int x = pVeh->getRoadPos() + m_Border_Lhs; // front of vehicle road position to screen position 00852 int y = 0; // just to initialize it 00853 00854 y = m_DriveOnRight ? m_BtmEdge - (lane-0.5)*m_LaneWidth : m_TopEdge + (lane-0.5)*m_LaneWidth; 00855 // and subtract half the vehicle width to get the y pos of the top edge 00856 y = y - m_VehicleWidth/2; 00857 00858 // So DirNeg vehicles' position corresponds with the front of the vehicle 00859 int DirectionFactor = DirPointsRight == true ? -1 : +1; 00860 int cx = DirectionFactor * m_VehicleLengthScale * pVeh->getLength(); 00861 CRect VehRect(x,y,x+cx,y+m_VehicleWidth); 00862 00863 DrawVehicleAt(pDC, pVeh->getID(), VehRect); 00864 00865 // draw the velocity on the vehicle 00866 double velocity = pVeh->getVelocity()*M_PER_S_TO_KM_PER_H; 00867 00868 if(m_bShowVelocity) 00869 { 00870 CString SpeedStr; SpeedStr.Format("%3.1f", velocity); 00871 CSize strSize = pDC->GetTextExtent(SpeedStr); 00872 x = x + cx/2 - strSize.cx/2; 00873 y = y + m_VehicleWidth/2 - strSize.cy/2; 00874 pDC->TextOut(x,y,SpeedStr); 00875 } 00876 }
| void CEvolveTrafficView::DrawVehicleAt | ( | CMemDC * | pDC, | |
| WORD | VEH_ID, | |||
| CRect | VehRect | |||
| ) | [private] |
Definition at line 878 of file EvolveTrafficView.cpp.
References VEH_COLOR_CAR, VEH_COLOR_CRANE, VEH_COLOR_LARGETRUCK, VEH_COLOR_LOWLOADER, VEH_COLOR_SMALLTRUCK, VEH_ID_CAR, VEH_ID_CRANE, VEH_ID_LARGETRUCK, VEH_ID_LOWLOADER, and VEH_ID_SMALLTRUCK.
Referenced by DrawLegendVehicle(), and DrawVehicle().
00879 { 00880 switch(VEH_ID) 00881 { 00882 case VEH_ID_CAR: 00883 pDC->FillSolidRect(VehRect, VEH_COLOR_CAR); 00884 break; 00885 case VEH_ID_SMALLTRUCK: 00886 pDC->FillSolidRect(VehRect, VEH_COLOR_SMALLTRUCK); 00887 break; 00888 case VEH_ID_LARGETRUCK: 00889 pDC->FillSolidRect(VehRect, VEH_COLOR_LARGETRUCK); 00890 break; 00891 case VEH_ID_CRANE: 00892 pDC->FillSolidRect(VehRect, VEH_COLOR_CRANE); 00893 break; 00894 case VEH_ID_LOWLOADER: 00895 pDC->FillSolidRect(VehRect, VEH_COLOR_LOWLOADER); 00896 break; 00897 default: 00898 pDC->FillSolidRect(VehRect, VEH_COLOR_CAR); // car 00899 } 00900 }
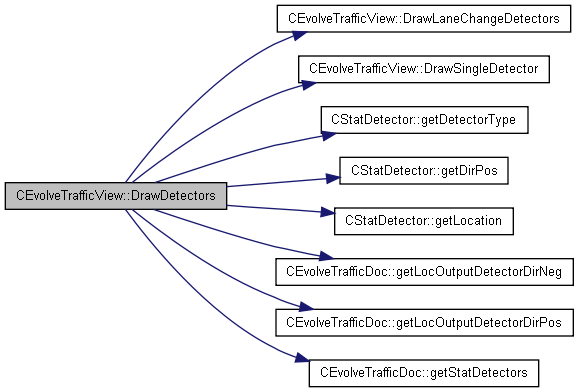
| void CEvolveTrafficView::DrawDetectors | ( | CMemDC * | pDC | ) | [private] |
Definition at line 1102 of file EvolveTrafficView.cpp.
References CLR_DET_COMPOSITION, CLR_DET_FLOWDENSITY, CLR_DET_HEADWAY, CLR_DET_OUTPUT, DrawLaneChangeDetectors(), DrawSingleDetector(), CStatDetector::getDetectorType(), CStatDetector::getDirPos(), CStatDetector::getLocation(), CEvolveTrafficDoc::getLocOutputDetectorDirNeg(), CEvolveTrafficDoc::getLocOutputDetectorDirPos(), CEvolveTrafficDoc::getStatDetectors(), m_pDoc, METRICS_TYPE_COMPOSITION, METRICS_TYPE_FLOWDENSITY, METRICS_TYPE_HEADWAY, and METRICS_TYPE_LANE_CHANGE.
Referenced by DrawRoad().
01103 { 01104 // Output Detectors 01105 double LocDetDirPos = m_pDoc->getLocOutputDetectorDirPos(); 01106 double LocDetDirNeg = m_pDoc->getLocOutputDetectorDirNeg(); 01107 DrawSingleDetector(pDC, CLR_DET_OUTPUT, LocDetDirPos, true); 01108 DrawSingleDetector(pDC, CLR_DET_OUTPUT, LocDetDirNeg, false); 01109 01110 // Metrics Detectors 01111 CObArray vSD; vSD.Copy( *(m_pDoc->getStatDetectors()) ); 01112 for(int i = 0; i < vSD.GetSize(); i++) 01113 { 01114 CStatDetector* pSD = reinterpret_cast<CStatDetector*>(vSD.GetAt(i)); 01115 WORD SDtype = pSD->getDetectorType(); 01116 bool bDraw = true; 01117 COLORREF COL; 01118 switch(SDtype) 01119 { 01120 case METRICS_TYPE_FLOWDENSITY: 01121 COL = CLR_DET_FLOWDENSITY; 01122 break; 01123 case METRICS_TYPE_HEADWAY: 01124 COL = CLR_DET_HEADWAY; 01125 break; 01126 case METRICS_TYPE_COMPOSITION: 01127 COL = CLR_DET_COMPOSITION; 01128 break; 01129 case METRICS_TYPE_LANE_CHANGE: // nothing to draw! 01130 DrawLaneChangeDetectors(pDC, pSD->getDirPos()); 01131 bDraw = false; 01132 break; 01133 default: 01134 COL = CLR_DET_FLOWDENSITY; 01135 } 01136 if(bDraw) 01137 DrawSingleDetector(pDC, COL, pSD->getLocation(), pSD->getDirPos()); 01138 } 01139 }
| void CEvolveTrafficView::DrawLaneChangeDetectors | ( | CMemDC * | pDC, | |
| bool | DirPos | |||
| ) | [private] |
Definition at line 1141 of file EvolveTrafficView.cpp.
References m_Border_Lhs, m_DriveOnRight, m_LaneWidth, m_NoLanesDirNeg, and m_NoLanesDirPos.
Referenced by DrawDetectors().
01142 { 01143 CString str = "LC"; 01144 CSize strSize = pDC->GetTextExtent(str); 01145 01146 int DriveSide = m_DriveOnRight ? +1 : -1; 01147 int DirFactor = DirPos ? +1 : -1; 01148 int nLanes = DirPos ? m_NoLanesDirPos : m_NoLanesDirNeg; 01149 01150 int xScrnLoc = m_Border_Lhs - strSize.cx - 2; 01151 int ypos = DirFactor* DriveSide * nLanes * m_LaneWidth /2; 01152 01153 pDC->TextOut(xScrnLoc,ypos-strSize.cy/2,str); 01154 }
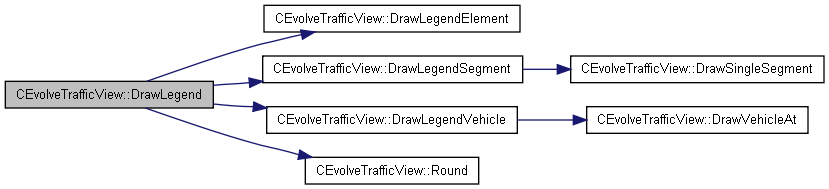
| void CEvolveTrafficView::DrawLegend | ( | CMemDC * | pDC | ) | [private] |
Definition at line 938 of file EvolveTrafficView.cpp.
References CLR_BACKGRND, CLR_DET_COMPOSITION, CLR_DET_FLOWDENSITY, CLR_DET_HEADWAY, CLR_DET_OUTPUT, CLR_FEAT_GRADIENT, CLR_FEAT_SPEEDLIMIT, CLR_LEGEND_TEXT, DrawLegendElement(), DrawLegendSegment(), DrawLegendVehicle(), FEAT_GRADIENT, FEAT_SPEEDLIMIT, m_Border_Lhs, m_Border_Top, m_ClientRect, m_Scale, Round(), VEH_ID_CAR, VEH_ID_CRANE, VEH_ID_LARGETRUCK, VEH_ID_LOWLOADER, and VEH_ID_SMALLTRUCK.
Referenced by OnDraw().
00939 { 00940 pDC->SetTextColor(CLR_LEGEND_TEXT); 00941 pDC->SetBkColor(CLR_BACKGRND); 00942 00943 CString strTime = "Real Time - Day: 00 - 00:00:00.00"; 00944 CSize timeSize = pDC->GetTextExtent(strTime); 00945 00946 // initial positions 00947 int ypos = Round(-(m_ClientRect.Height()/2)/m_Scale) + m_Border_Top; // this keeps the timer position scale invariant 00948 int xpos = m_Border_Lhs + timeSize.cx + m_Border_Lhs; // to avoid a clash with the timer 00949 int ygap = 20/m_Scale; 00950 int LineLength = m_Border_Lhs/m_Scale; // why not! 00951 int LineToText = 20/m_Scale; 00952 00953 DrawLegendVehicle(pDC, VEH_ID_CAR, "Car", LineToText, xpos, ypos); ypos += ygap; 00954 DrawLegendVehicle(pDC, VEH_ID_SMALLTRUCK, "Small Truck", LineToText, xpos, ypos); ypos += ygap; 00955 DrawLegendVehicle(pDC, VEH_ID_LARGETRUCK, "Large Truck", LineToText, xpos, ypos); ypos += ygap; 00956 DrawLegendVehicle(pDC, VEH_ID_CRANE, "Crane", LineToText, xpos, ypos); ypos += ygap; 00957 DrawLegendVehicle(pDC, VEH_ID_LOWLOADER, "Low-loader", LineToText, xpos, ypos); ypos += ygap; 00958 00959 ypos -= 5*ygap; //reset ypos 00960 CSize strSize = pDC->GetTextExtent("Large Truck"); 00961 xpos += LineLength+LineToText+strSize.cx+2*m_Border_Lhs; 00962 00963 DrawLegendElement(pDC, LineLength, LineToText, xpos, ypos, "Output Detector", CLR_DET_OUTPUT); ypos += ygap; 00964 DrawLegendElement(pDC, LineLength, LineToText, xpos, ypos, "Flow-Density Detector", CLR_DET_FLOWDENSITY); ypos += ygap; 00965 DrawLegendElement(pDC, LineLength, LineToText, xpos, ypos, "Headway Detector", CLR_DET_HEADWAY); ypos += ygap; 00966 DrawLegendElement(pDC, LineLength, LineToText, xpos, ypos, "Composition Detector", CLR_DET_COMPOSITION); ypos += ygap; 00967 00968 pDC->TextOut(xpos,ypos,"LC"); 00969 pDC->TextOut(xpos+LineLength+LineToText,ypos,"Lane Change Detector"); 00970 00971 ypos -= 4*ygap; //reset ypos 00972 strSize = pDC->GetTextExtent("Lane Change Detector"); 00973 xpos += LineLength+LineToText+strSize.cx+2*m_Border_Lhs; 00974 00975 DrawLegendSegment(pDC, CLR_FEAT_SPEEDLIMIT, HS_DIAGCROSS, FEAT_SPEEDLIMIT, 00976 "Speed limit section", 50, LineToText, xpos, ypos); 00977 ypos += 2*ygap+5; 00978 DrawLegendSegment(pDC, CLR_FEAT_GRADIENT, HS_VERTICAL, FEAT_GRADIENT, 00979 "Gradient section", 5, LineToText, xpos, ypos); 00980 00981 }
| void CEvolveTrafficView::DrawLegendElement | ( | CMemDC * | pDC, | |
| int | LineLength, | |||
| int | LineToText, | |||
| int | xpos, | |||
| int | ypos, | |||
| CString | str, | |||
| COLORREF | COL | |||
| ) | [private] |
Definition at line 1008 of file EvolveTrafficView.cpp.
Referenced by DrawLegend().
01010 { 01011 CPen DetPen; 01012 01013 DetPen.CreatePen(PS_SOLID, 3, COL); 01014 pDC->SelectObject(&DetPen); 01015 CSize strSize = pDC->GetTextExtent(str); 01016 pDC->TextOut(xpos+LineLength+LineToText,ypos,str); 01017 ypos += strSize.cy/2; 01018 pDC->MoveTo(xpos,ypos); 01019 pDC->LineTo(xpos+LineLength,ypos); 01020 }
| void CEvolveTrafficView::DrawSingleSegment | ( | CMemDC * | pDC, | |
| COLORREF | COL, | |||
| WORD | HATCH, | |||
| WORD | FeatType, | |||
| int | val, | |||
| CRect | rect, | |||
| int | yTextOffset | |||
| ) | [private] |
Definition at line 1062 of file EvolveTrafficView.cpp.
References FEAT_GRADIENT, and FEAT_SPEEDLIMIT.
Referenced by DrawLegendSegment(), and DrawRoadSegments().
01064 { 01065 int x1 = rect.left; 01066 int x2 = rect.right; 01067 int y1 = rect.top; 01068 int y2 = rect.bottom; 01069 01070 CPen SegEdgePen(PS_SOLID, 1, COL); 01071 CPen* pOldPen = pDC->SelectObject(&SegEdgePen); // store previous pen 01072 CBrush SegBrush(HATCH,COL); 01073 CRect SegRect(x1,y1,x2,y2); 01074 CBrush* pOldBrush = pDC->SelectObject(&SegBrush); // select drawing object and store previous one 01075 pDC->SetBkMode(TRANSPARENT); // set background mode 01076 pDC->Rectangle(SegRect); // draw a rectangle which will be patterned //FillRect(SegRect,&SegBrush); 01077 pDC->SelectObject(pOldBrush); // reset previous objects 01078 01079 CPen SegEndsPen(PS_SOLID, 3, COL); // MAGIC NUMBER - seg pen width - keep same as detector pen width 01080 pDC->SelectObject(&SegEndsPen); 01081 pDC->MoveTo(x1,y1); pDC->LineTo(x1,y2); 01082 pDC->MoveTo(x2,y1); pDC->LineTo(x2,y2); 01083 01084 pDC->SelectObject(pOldPen); // now reselect old pen 01085 01086 CString str; 01087 switch(FeatType) 01088 { 01089 case FEAT_SPEEDLIMIT: 01090 str.Format("%d km/h",val); 01091 break; 01092 case FEAT_GRADIENT: 01093 str.Format("%d%%",val); 01094 break; 01095 default: 01096 str.Format("%d km/h",val); 01097 } 01098 CSize strSize = pDC->GetTextExtent(str); 01099 pDC->TextOut((x1+x2)/2-strSize.cx/2,(y1+y2)/2-strSize.cy/2+yTextOffset,str); 01100 }
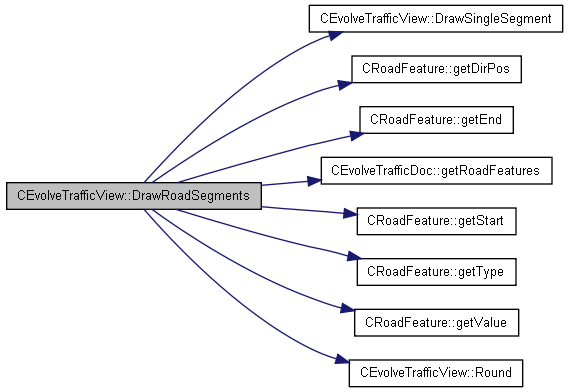
| void CEvolveTrafficView::DrawRoadSegments | ( | CMemDC * | pDC | ) | [private] |
Definition at line 1022 of file EvolveTrafficView.cpp.
References CLR_FEAT_GRADIENT, CLR_FEAT_SPEEDLIMIT, DrawSingleSegment(), FEAT_GRADIENT, FEAT_SPEEDLIMIT, CRoadFeature::getDirPos(), CRoadFeature::getEnd(), CEvolveTrafficDoc::getRoadFeatures(), CRoadFeature::getStart(), CRoadFeature::getType(), CRoadFeature::getValue(), m_Border_Lhs, m_DriveOnRight, m_LaneWidth, m_NoLanesDirNeg, m_NoLanesDirPos, m_pDoc, M_PER_S_TO_KM_PER_H, and Round().
Referenced by DrawRoad().
01023 { 01024 CObArray vSeg; vSeg.Copy( *(m_pDoc->getRoadFeatures()) ); 01025 for(int i = 0; i < vSeg.GetSize(); i++) 01026 { 01027 CRoadFeature* pFeat = reinterpret_cast<CRoadFeature*>(vSeg.GetAt(i)); 01028 WORD FeatType = pFeat->getType(); 01029 int FeatValue = 0; 01030 COLORREF COL; 01031 WORD HATCH; 01032 switch(FeatType) 01033 { 01034 case FEAT_SPEEDLIMIT: 01035 COL = CLR_FEAT_SPEEDLIMIT; 01036 HATCH = HS_DIAGCROSS; 01037 FeatValue = Round(pFeat->getValue()*M_PER_S_TO_KM_PER_H); 01038 break; 01039 case FEAT_GRADIENT: 01040 COL = CLR_FEAT_GRADIENT; 01041 HATCH = HS_VERTICAL; 01042 FeatValue = Round(pFeat->getValue()); 01043 break; 01044 default: 01045 COL = CLR_FEAT_SPEEDLIMIT; 01046 } 01047 01048 bool DirPos = pFeat->getDirPos(); 01049 int DriveSide = m_DriveOnRight ? +1 : -1; 01050 int DirFactor = DirPos ? +1 : -1; 01051 int nLanes = DirPos ? m_NoLanesDirPos : m_NoLanesDirNeg; 01052 01053 int x1 = pFeat->getStart() + m_Border_Lhs; 01054 int x2 = pFeat->getEnd() + m_Border_Lhs; 01055 int y1 = 0; 01056 int y2 = DirFactor * DriveSide * nLanes * m_LaneWidth; 01057 CRect segRect(x1,y1,x2,y2); 01058 DrawSingleSegment(pDC, COL, HATCH, FeatType, FeatValue, segRect,m_LaneWidth/2); 01059 } 01060 }
| void CEvolveTrafficView::DrawSingleDetector | ( | CMemDC * | pDC, | |
| COLORREF | COL, | |||
| int | Loc, | |||
| bool | DirPos | |||
| ) | [private] |
Definition at line 1156 of file EvolveTrafficView.cpp.
References m_Border_Lhs, m_DriveOnRight, m_LaneWidth, m_NoLanesDirNeg, and m_NoLanesDirPos.
Referenced by DrawDetectors().
01157 { 01158 // Draw detectors 01159 CPen DetectorPen(PS_SOLID, 3, COL); // MAGIC NUMBER - detector pen width 01160 pDC->SelectObject(&DetectorPen); 01161 01162 int ScrnLoc = Loc + m_Border_Lhs; 01163 01164 int DriveSide = m_DriveOnRight ? +1 : -1; 01165 int DirFactor = DirPos ? +1 : -1; 01166 int nLanes = DirPos ? m_NoLanesDirPos : m_NoLanesDirNeg; 01167 01168 int ypos = 0;//DirFactor*DriveSide*m_RoadWidth/2;// + m_ClientRect.Height()/2; // bottom/top of road 01169 pDC->MoveTo(ScrnLoc,ypos); // start at bottom/top 01170 //ypos = ypos - DirFactor* DriveSide * nLanes * m_LaneWidth; // distance to top/bottom 01171 ypos = DirFactor* DriveSide * nLanes * m_LaneWidth; 01172 pDC->LineTo(ScrnLoc,ypos); // draw line 01173 }
| void CEvolveTrafficView::DrawLegendSegment | ( | CMemDC * | pDC, | |
| COLORREF | COL, | |||
| WORD | HATCH, | |||
| WORD | FeatType, | |||
| CString | str, | |||
| int | value, | |||
| int | LineToText, | |||
| int | xpos, | |||
| int | ypos | |||
| ) | [private] |
Definition at line 995 of file EvolveTrafficView.cpp.
References DrawSingleSegment(), and m_Scale.
Referenced by DrawLegend().
00997 { 00998 int rectWidth = 80/m_Scale; 00999 int rectHeight = 30/m_Scale; 01000 01001 CRect segRect(xpos,ypos,xpos+rectWidth, ypos+rectHeight); 01002 DrawSingleSegment(pDC, COL, HATCH, FeatType, value, segRect, 0); 01003 01004 CSize strSize = pDC->GetTextExtent(str); 01005 pDC->TextOut(xpos+rectWidth+LineToText, ypos+rectHeight/2-strSize.cy/2,str); 01006 }

| void CEvolveTrafficView::DrawLegendVehicle | ( | CMemDC * | pDC, | |
| WORD | VehType, | |||
| CString | str, | |||
| int | LineToText, | |||
| int | xpos, | |||
| int | ypos | |||
| ) | [private] |
Definition at line 983 of file EvolveTrafficView.cpp.
References DrawVehicleAt(), and m_Scale.
Referenced by DrawLegend().
00984 { 00985 int rectWidth = 20/m_Scale; 00986 int rectHeight = 10/m_Scale; 00987 00988 CSize strSize = pDC->GetTextExtent(str); 00989 pDC->TextOut(xpos+rectWidth+LineToText, ypos,str); 00990 ypos += strSize.cy/2 - rectHeight/2; 00991 CRect VehRect(xpos,ypos,xpos+rectWidth, ypos+rectHeight); 00992 DrawVehicleAt(pDC, VehType, VehRect); 00993 }

Member Data Documentation
bool CEvolveTrafficView::m_bShowLegend [private] |
bool CEvolveTrafficView::m_bShowVelocity [private] |
int CEvolveTrafficView::m_BtmEdge [private] |
Definition at line 90 of file EvolveTrafficView.h.
Referenced by DrawRoad(), DrawRuler(), DrawVehicle(), initRoad(), and OnLButtonDown().
int CEvolveTrafficView::m_TopEdge [private] |
Definition at line 91 of file EvolveTrafficView.h.
Referenced by DrawRoad(), DrawVehicle(), initRoad(), and OnLButtonDown().
int CEvolveTrafficView::m_nLanesOnBtm [private] |
int CEvolveTrafficView::m_nLanesOnTop [private] |
bool CEvolveTrafficView::m_DriveOnRight [private] |
Definition at line 94 of file EvolveTrafficView.h.
Referenced by DrawLaneChangeDetectors(), DrawRoadSegments(), DrawSingleDetector(), DrawVehicle(), initRoad(), and OnLButtonDown().
double CEvolveTrafficView::m_ExaggerateWidths [private] |
CSize CEvolveTrafficView::m_DrawArea [private] |
Definition at line 98 of file EvolveTrafficView.h.
Referenced by initRoad(), OnInitialUpdate(), OnPrepareDC(), and SetZoomScale().
int CEvolveTrafficView::m_LastPercentComplete [private] |
Definition at line 101 of file EvolveTrafficView.h.
Referenced by doSimFinished(), and UpdateProgressBar().
double CEvolveTrafficView::m_MaxTimeWarp [private] |
Definition at line 128 of file EvolveTrafficView.h.
Referenced by setMaxTimeWarp(), and ValidateTimeWarp().
int CEvolveTrafficView::m_SimTimeStep [private] |
int CEvolveTrafficView::m_PauseTime [private] |
int CEvolveTrafficView::m_StartRealTime [private] |
Definition at line 131 of file EvolveTrafficView.h.
Referenced by doLoop(), doSimStart(), DrawTimer(), OnRunInvisible(), and OnToolsPause().
int CEvolveTrafficView::m_CurentRealTime [private] |
Definition at line 132 of file EvolveTrafficView.h.
Referenced by DrawTimer(), and OnRunInvisible().
double CEvolveTrafficView::m_CurentSimTime [private] |
Definition at line 133 of file EvolveTrafficView.h.
Referenced by doSimStart(), DrawTimer(), and OnRunInvisible().
BOOL CEvolveTrafficView::m_bPause [private] |
Definition at line 134 of file EvolveTrafficView.h.
Referenced by doLoop(), DrawTimer(), OnLButtonDown(), OnRunVisible(), OnToolsPause(), and OnUpdateToolsPause().
int CEvolveTrafficView::m_TimerSpeed [private] |
int CEvolveTrafficView::m_PercentComplete [private] |
CRect CEvolveTrafficView::m_ClientRect [private] |
Definition at line 138 of file EvolveTrafficView.h.
Referenced by DrawLegend(), DrawTimer(), OnPrepareDC(), and SetZoomScale().
int CEvolveTrafficView::m_YCoordTop [private] |
Definition at line 139 of file EvolveTrafficView.h.
RECT CEvolveTrafficView::m_RoadRect [private] |
Definition at line 140 of file EvolveTrafficView.h.
bool CEvolveTrafficView::m_bInSimulation [private] |
Definition at line 141 of file EvolveTrafficView.h.
Referenced by doLoop(), doSimFinished(), doSimStart(), DrawTimer(), OnDraw(), OnRunInvisible(), OnRunVisible(), OnUpdateToolsPause(), OnUpdateToolsSlowdown(), OnUpdateToolsSpeedup(), and OnUpdateToolsStop().
double CEvolveTrafficView::m_Scale [private] |
Definition at line 143 of file EvolveTrafficView.h.
Referenced by DrawLegend(), DrawLegendSegment(), DrawLegendVehicle(), DrawTimer(), initRoad(), OnPrepareDC(), OnToolsPrefs(), OnToolsZoomin(), OnToolsZoomout(), and SetZoomScale().
double CEvolveTrafficView::m_TimeWarp [private] |
Definition at line 144 of file EvolveTrafficView.h.
Referenced by doLoop(), OnToolsPrefs(), OnToolsSlowdown(), OnToolsSpeedup(), setMaxTimeWarp(), and ValidateTimeWarp().
double CEvolveTrafficView::m_VehicleLengthScale [private] |
Definition at line 145 of file EvolveTrafficView.h.
Referenced by DrawVehicle(), FindVehicle(), and OnToolsPrefs().
double CEvolveTrafficView::m_VehicleWidth [private] |
Definition at line 146 of file EvolveTrafficView.h.
Referenced by DrawVehicle(), and OnToolsPrefs().
double CEvolveTrafficView::m_TickLength [private] |
int CEvolveTrafficView::m_TickStep [private] |
Definition at line 148 of file EvolveTrafficView.h.
Referenced by DrawRuler(), initRoad(), and OnToolsPrefs().
double CEvolveTrafficView::m_LaneWidth [private] |
Definition at line 149 of file EvolveTrafficView.h.
Referenced by DrawLaneChangeDetectors(), DrawRoad(), DrawRoadSegments(), DrawSingleDetector(), DrawVehicle(), initRoad(), OnLButtonDown(), and OnToolsPrefs().
double CEvolveTrafficView::m_Border_Top [private] |
Definition at line 150 of file EvolveTrafficView.h.
Referenced by DrawLegend(), DrawTimer(), initRoad(), and OnToolsPrefs().
double CEvolveTrafficView::m_Border_Btm [private] |
double CEvolveTrafficView::m_Border_Lhs [private] |
Definition at line 152 of file EvolveTrafficView.h.
Referenced by DrawLaneChangeDetectors(), DrawLegend(), DrawRoad(), DrawRoadSegments(), DrawRuler(), DrawSingleDetector(), DrawTimer(), DrawVehicle(), initRoad(), OnLButtonDown(), OnPrepareDC(), and OnToolsPrefs().
double CEvolveTrafficView::m_Border_Rhs [private] |
int CEvolveTrafficView::m_NoDirections [private] |
int CEvolveTrafficView::m_NoLanes [private] |
Definition at line 156 of file EvolveTrafficView.h.
Referenced by DrawRoad(), initRoad(), and OnLButtonDown().
int CEvolveTrafficView::m_NoLanesDirPos [private] |
Definition at line 157 of file EvolveTrafficView.h.
Referenced by DrawLaneChangeDetectors(), DrawRoadSegments(), DrawSingleDetector(), and initRoad().
int CEvolveTrafficView::m_NoLanesDirNeg [private] |
Definition at line 158 of file EvolveTrafficView.h.
Referenced by DrawLaneChangeDetectors(), DrawRoadSegments(), DrawSingleDetector(), and initRoad().
int CEvolveTrafficView::m_RoadLength [private] |
Definition at line 159 of file EvolveTrafficView.h.
Referenced by DrawRoad(), initRoad(), OnConfigFeatures(), OnConfigMetrics(), and OnKeyDown().
int CEvolveTrafficView::m_NoTicks [private] |
int CEvolveTrafficView::m_RoadWidth [private] |
M2D CEvolveTrafficView::m_VehiclePositions [private] |
Definition at line 163 of file EvolveTrafficView.h.
Referenced by doLoop(), doSimFinished(), FindVehicle(), and OnDraw().
CEvolveTrafficDoc* CEvolveTrafficView::m_pDoc [private] |
Definition at line 165 of file EvolveTrafficView.h.
Referenced by doLoop(), doSimFinished(), doSimStart(), DrawDetectors(), DrawRoadSegments(), DrawTimer(), initRoad(), OnConfigFeatures(), OnConfigMetrics(), OnConfigSim(), OnConfigTraf(), OnInitialUpdate(), OnRunInvisible(), and UpdateProgressBar().
CProgressBar* CEvolveTrafficView::m_pProgBar [private] |
Definition at line 166 of file EvolveTrafficView.h.
Referenced by doSimFinished(), doSimStart(), and UpdateProgressBar().
CMessageTip CEvolveTrafficView::m_DataTip [private] |
Definition at line 167 of file EvolveTrafficView.h.
Referenced by OnInitialUpdate(), and OnLButtonDown().
double CEvolveTrafficView::MIN_VIEW_SCALE [private] |
double CEvolveTrafficView::DATATIP_DELAY [private] |
COLORREF CEvolveTrafficView::CLR_BACKGRND [private] |
Definition at line 172 of file EvolveTrafficView.h.
Referenced by DrawLegend(), DrawRuler(), and DrawTimer().
COLORREF CEvolveTrafficView::CLR_DET_COMPOSITION [private] |
Definition at line 173 of file EvolveTrafficView.h.
Referenced by DrawDetectors(), and DrawLegend().
COLORREF CEvolveTrafficView::CLR_DET_FLOWDENSITY [private] |
Definition at line 174 of file EvolveTrafficView.h.
Referenced by DrawDetectors(), and DrawLegend().
COLORREF CEvolveTrafficView::CLR_DET_HEADWAY [private] |
Definition at line 175 of file EvolveTrafficView.h.
Referenced by DrawDetectors(), and DrawLegend().
COLORREF CEvolveTrafficView::CLR_DET_OUTPUT [private] |
Definition at line 176 of file EvolveTrafficView.h.
Referenced by DrawDetectors(), and DrawLegend().
COLORREF CEvolveTrafficView::CLR_FEAT_GRADIENT [private] |
Definition at line 177 of file EvolveTrafficView.h.
Referenced by DrawLegend(), and DrawRoadSegments().
COLORREF CEvolveTrafficView::CLR_FEAT_SPEEDLIMIT [private] |
Definition at line 178 of file EvolveTrafficView.h.
Referenced by DrawLegend(), and DrawRoadSegments().
COLORREF CEvolveTrafficView::CLR_LEGEND_TEXT [private] |
COLORREF CEvolveTrafficView::CLR_ROAD_LINES [private] |
COLORREF CEvolveTrafficView::CLR_ROAD_SURFACE [private] |
COLORREF CEvolveTrafficView::CLR_RULER_LINES [private] |
COLORREF CEvolveTrafficView::CLR_RULER_TEXT [private] |
COLORREF CEvolveTrafficView::VEH_COLOR_CAR [private] |
COLORREF CEvolveTrafficView::VEH_COLOR_SMALLTRUCK [private] |
COLORREF CEvolveTrafficView::VEH_COLOR_LARGETRUCK [private] |
COLORREF CEvolveTrafficView::VEH_COLOR_CRANE [private] |
COLORREF CEvolveTrafficView::VEH_COLOR_LOWLOADER [private] |
The documentation for this class was generated from the following files:
- D:/~Research/Code/C++/EvolveTraffic/EvolveTrafficView.h
- D:/~Research/Code/C++/EvolveTraffic/EvolveTrafficView.cpp
